同期速度とは?
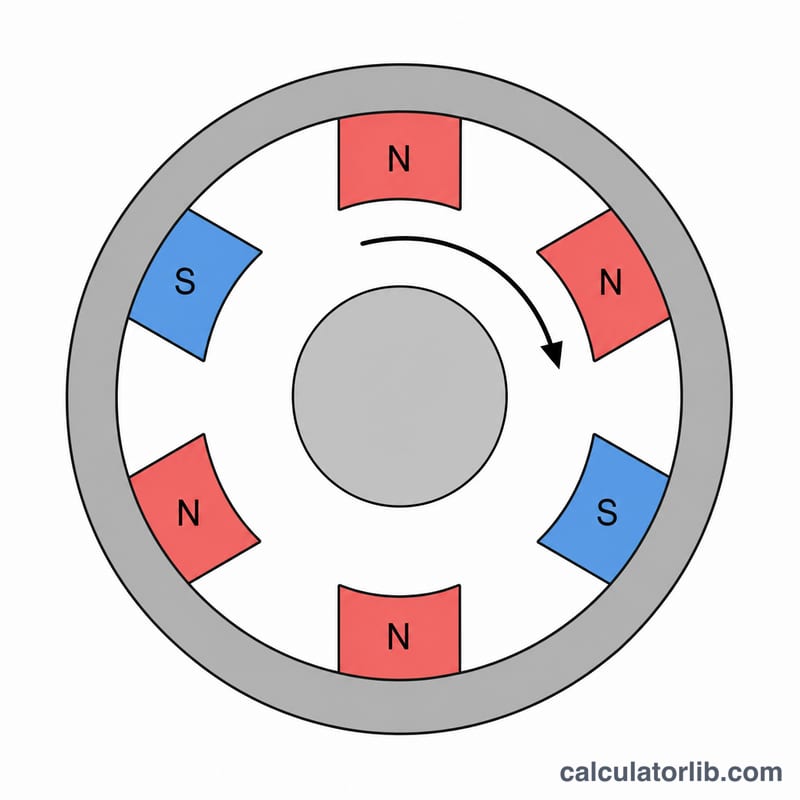
同期速度とは、誘導電動機・同期電動機・交流発電機(オルタネータ)などの交流機で、固定子(ステータ)巻線が作り出す回転磁界の回転速度のことです。これは磁界が回転する理論上の速度であり、実際の回転子(ロータ)速度を考えるうえでの基準になります。誘導電動機の場合、回転子は常に同期速度よりわずかに遅く回ります。この差を「すべり(スリップ)」と呼びます。
この計算ツールの使い方
電源周波数をヘルツ(Hz)単位で入力してください。日本は東日本が 50 Hz、西日本が 60 Hz と地域で異なり、北米はおおむね 60 Hz、ヨーロッパ・アジア・アフリカの多くは 50 Hz です。続いて機械の磁極数を入力します(磁極数は必ず偶数で、2、4、6、8…となります)。計算ツールは同期速度を毎分回転数(RPM)と毎秒回転数(rev/s)で表示します。
計算式の解説
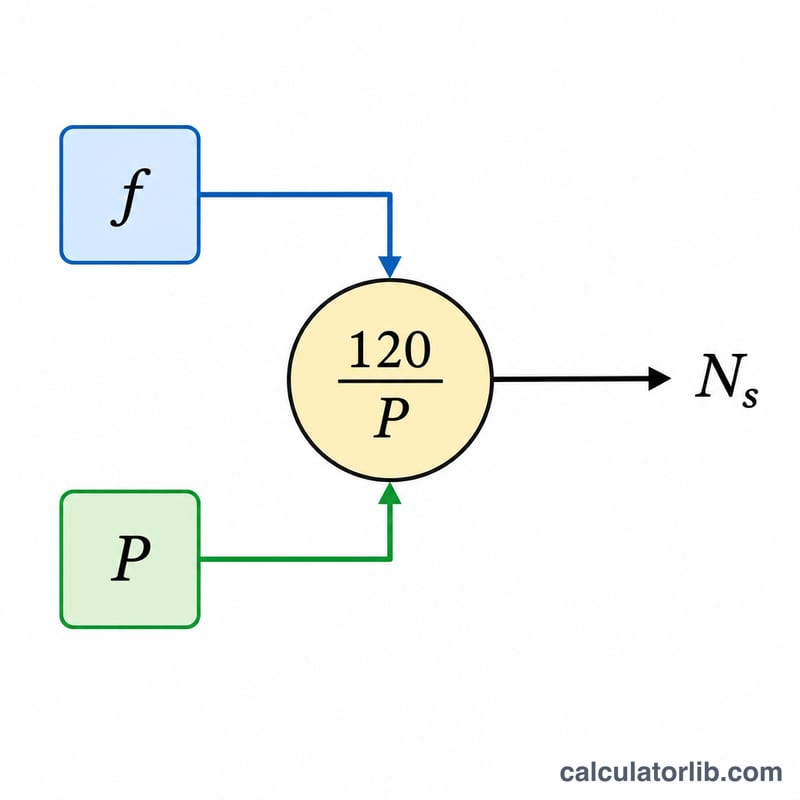
基本となる式は $$N_s = \frac{120 \times f}{P}$$ です。ここで \(N_s\) は同期速度(RPM)、\(f\) は電源周波数(Hz)、\(P\) は総極数を表します。係数 120 は、毎秒あたりの電気的周波数を毎分あたりの機械的回転数へ換算すると同時に、極対数を考慮するためのものです(120 = 60 秒/分 \(\times\) 2 極/極対)。
計算例
4 極の誘導電動機を 60 Hz の電源につないだ場合を考えます。$$N_s = \frac{120 \times 60}{4} = \frac{7200}{4} = 1800 \text{ RPM}$$ となります。毎秒回転数に直すと \(1800 / 60 = 30\) rev/s です。実際に負荷をかけた状態では回転子は 1750 RPM 前後で回り、すべりはおよそ 2.8% になります。
よくある質問(FAQ)
なぜ極数は偶数でなければならないのですか? 磁極は必ずN極とS極の対で存在するため、総極数は常に偶数になります。
回転子は同期速度で回るのですか? 同期電動機は構造上、同期速度で回ります。一方、誘導電動機はわずかに遅く回ります。これは、磁界と回転子の間に相対運動(すべり)があるときにのみトルクが発生するためです。
50 Hz の電源では何が変わりますか? 同じ 4 極の電動機を 50 Hz で動かすと、\(N_s = \frac{120 \times 50}{4} = 1500\) RPM となります。これが、同じ極数でも 50 Hz の機械が 60 Hz の機械より遅く回る理由です。