
Lotka-Volterra modeli nedir?
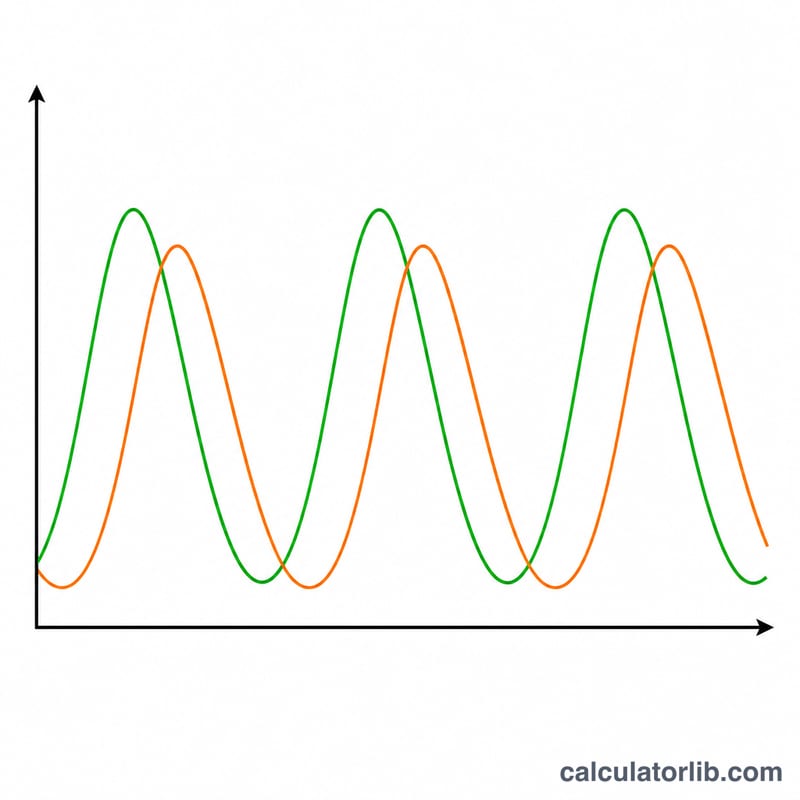
Lotka-Volterra denklemleri, biri avcı diğeri av olmak üzere iki türün etkileşime girdiği biyolojik sistemlerin dinamiğini tanımlayan, birinci dereceden doğrusal olmayan bir diferansiyel denklem çiftidir. 1920'lerde Alfred Lotka ve Vito Volterra tarafından birbirinden bağımsız olarak geliştirilen model, popülasyonların döngüsel yükseliş ve düşüşünü ortaya koyar: av sayısı artar, avcılar bollukla beslenip çoğalır, av sayısı çöker, avcılar açlıktan azalır ve döngü yeniden başlar.
Bu hesaplayıcı nasıl kullanılır?
Başlangıç av popülasyonunu (x₀) ve avcı popülasyonunu (y₀), dört oran parametresini (α av büyüme oranı, β avlanma oranı, δ av yiyerek avcı büyümesi, γ avcı ölüm oranı), bir zaman adımını (dt) ve entegre edilecek adım sayısını girin. Hesaplayıcı, sistemi klasik dördüncü dereceden Runge-Kutta (RK4) yöntemiyle ilerletir; son popülasyonları, her popülasyonun ulaştığı tepe değeri ve analitik denge noktasını raporlar.
Formülün açıklaması
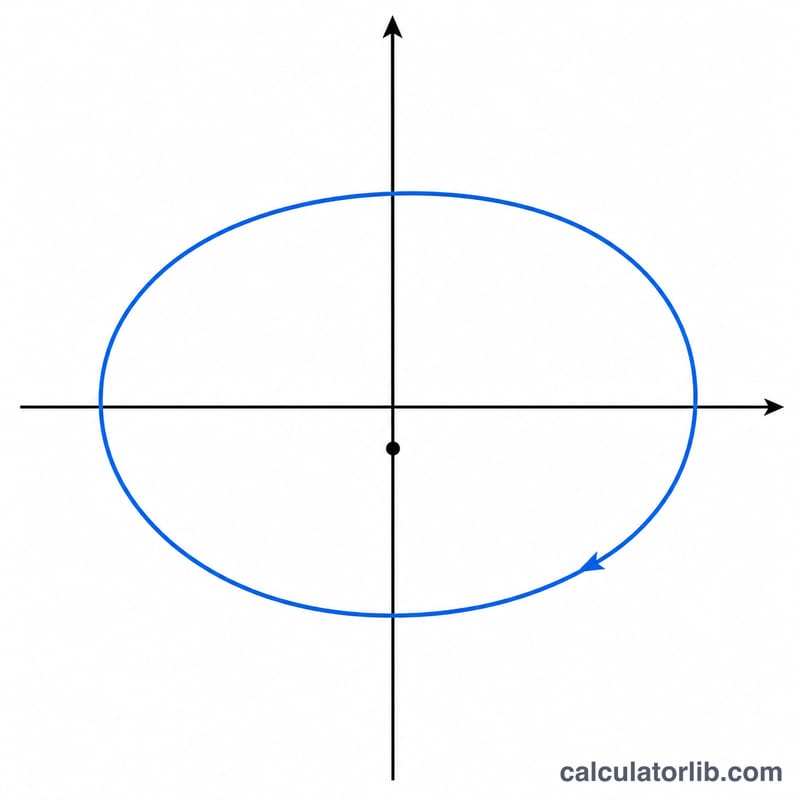
Av denklemi $$\frac{dx}{dt} = \alpha\,x - \beta\,x\,y$$ avların üstel olarak çoğaldığını ancak avcılarla karşılaştıklarında sayılarının azaldığını ifade eder. Avcı denklemi $$\frac{dy}{dt} = \delta\,x\,y - \gamma\,y$$ ise avcıların başarılı avlardan beslenerek çoğaldığını ve doğal olarak öldüğünü belirtir. Sıfırdan farklı denge noktası \(x^{*} = \gamma/\delta\) ve \(y^{*} = \alpha/\beta\) değerlerinde bulunur — bu noktada her iki türev de sıfır olur ve popülasyonlar sabit kalır.
Çözümlü örnek
x₀ = 40, y₀ = 9, α = 0,1, β = 0,02, δ = 0,01, γ = 0,1 değerleriyle dt = 0,1 ve 1000 adım (t değeri 100'e kadar) için popülasyonlar salınım yapar. Denge noktası $$x^{*} = \frac{0{,}1}{0{,}01} = 10 \text{ av}$$ ve $$y^{*} = \frac{0{,}1}{0{,}02} = 5 \text{ avcı}$$ dır; döngünün etrafında döndüğü merkez budur.
Sıkça sorulan sorular
Hangi entegrasyon yöntemi kullanılıyor? Aynı adım boyutu için basit Euler yönteminden çok daha doğru sonuç veren dördüncü dereceden Runge-Kutta yöntemi.
Popülasyonum neden patlıyor veya sıfıra düşüyor? Çok büyük zaman adımları ya da aşırı oran değerleri sayısal çözümü kararsız hale getirebilir. Daha pürüzsüz ve doğru döngüler için dt değerini düşürün.
Denge noktasından başlarsam ne olur? \(x_0 = \gamma/\delta\) ve \(y_0 = \alpha/\beta\) olursa her iki türev de sıfır olur ve popülasyonlar sabit kalır — bu, sistemin sabit noktasıdır.