
Mô hình Lotka-Volterra là gì?
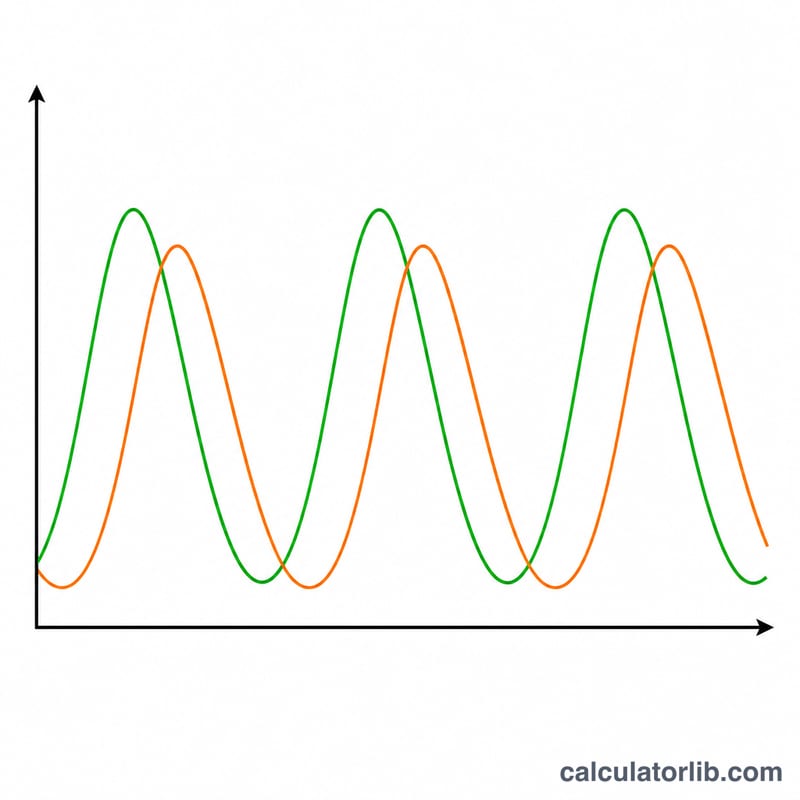
Phương trình Lotka-Volterra là một cặp phương trình vi phân phi tuyến bậc nhất, mô tả động lực của các hệ sinh học nơi hai loài tương tác với nhau — một loài là thú săn mồi và loài kia là con mồi. Được Alfred Lotka và Vito Volterra phát triển độc lập vào thập niên 1920, mô hình này thể hiện chu kỳ tăng giảm tuần hoàn của quần thể: con mồi sinh sôi, thú săn mồi no đủ và phát triển, con mồi sụt giảm, thú săn mồi đói khát, rồi chu kỳ lại lặp lại từ đầu.
Cách dùng công cụ này
Bạn hãy nhập quần thể con mồi ban đầu (\(x_0\)) và quần thể thú săn mồi ban đầu (\(y_0\)), bốn hệ số tỉ lệ (\(\alpha\) tốc độ sinh trưởng con mồi, \(\beta\) tốc độ săn mồi, \(\delta\) tốc độ tăng trưởng của thú săn mồi nhờ ăn con mồi, \(\gamma\) tốc độ chết của thú săn mồi), bước thời gian (\(dt\)) và số bước cần tích phân. Công cụ sẽ tiến triển hệ theo phương pháp Runge-Kutta bậc bốn (RK4) cổ điển, rồi báo cáo quần thể cuối cùng, đỉnh mà mỗi quần thể đạt được, cùng với điểm cân bằng tính theo công thức giải tích.
Giải thích công thức
Phương trình con mồi $$\frac{dx}{dt} = \alpha\,x - \beta\,x\,y$$ cho thấy con mồi tăng theo cấp số nhân nhưng bị tiêu hao khi gặp thú săn mồi. Phương trình thú săn mồi $$\frac{dy}{dt} = \delta\,x\,y - \gamma\,y$$ cho thấy thú săn mồi phát triển nhờ những cuộc săn thành công và chết đi một cách tự nhiên. Điểm cân bằng khác không nằm tại $$x^{*} = \frac{\gamma}{\delta} \qquad y^{*} = \frac{\alpha}{\beta}$$ — tại đó cả hai đạo hàm đều bằng không và quần thể giữ nguyên không đổi.
Ví dụ minh họa
Với \(x_0 = 40\), \(y_0 = 9\), \(\alpha = 0.1\), \(\beta = 0.02\), \(\delta = 0.01\), \(\gamma = 0.1\), \(dt = 0.1\) trong 1000 bước (\(t\) lên đến 100), các quần thể dao động qua lại. Điểm cân bằng là $$x^{*} = \frac{0.1}{0.01} = 10 \text{ con mồi}$$ và $$y^{*} = \frac{0.1}{0.02} = 5 \text{ thú săn mồi}$$ — đây chính là tâm mà chu kỳ xoay quanh.
Câu hỏi thường gặp
Công cụ dùng phương pháp tích phân nào? Phương pháp Runge-Kutta bậc bốn, chính xác hơn nhiều so với phương pháp Euler đơn giản khi dùng cùng một bước thời gian.
Vì sao quần thể của tôi tăng vọt hoặc tụt về không? Bước thời gian quá lớn hoặc các hệ số quá cực đoan có thể khiến lời giải số trở nên bất ổn định. Hãy giảm \(dt\) để có những chu kỳ mượt mà và chính xác hơn.
Nếu tôi bắt đầu ngay tại điểm cân bằng thì sao? Nếu \(x_0 = \gamma/\delta\) và \(y_0 = \alpha/\beta\) thì cả hai đạo hàm đều bằng không, nên quần thể giữ nguyên không đổi — đó là điểm cố định của hệ.