てこの計算機とは?
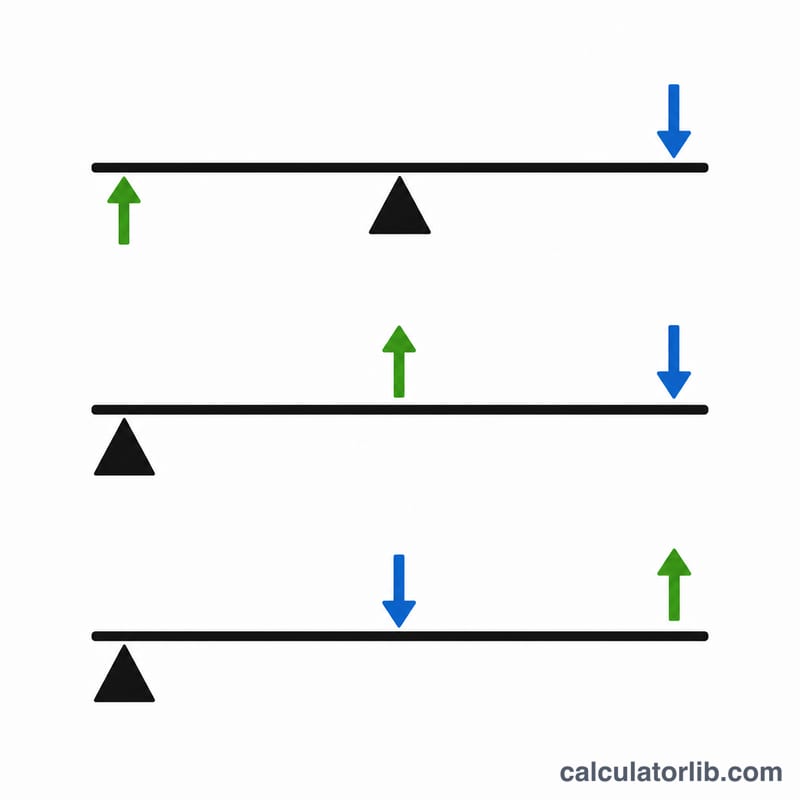
てこは、支点を中心に回転する剛体の棒で、古くから知られる6種類の単純機械のひとつです。この計算機はてこの原理を用いて、あらゆるてこの機械的倍率(MA)と、生み出せる出力(荷重)の力を求めます。支点を基準に測った力点側の腕の長さ(力点アーム)と作用点側の腕の長さ(荷重アーム)を入力すれば、第1種・第2種・第3種いずれのてこにも対応します。
使い方
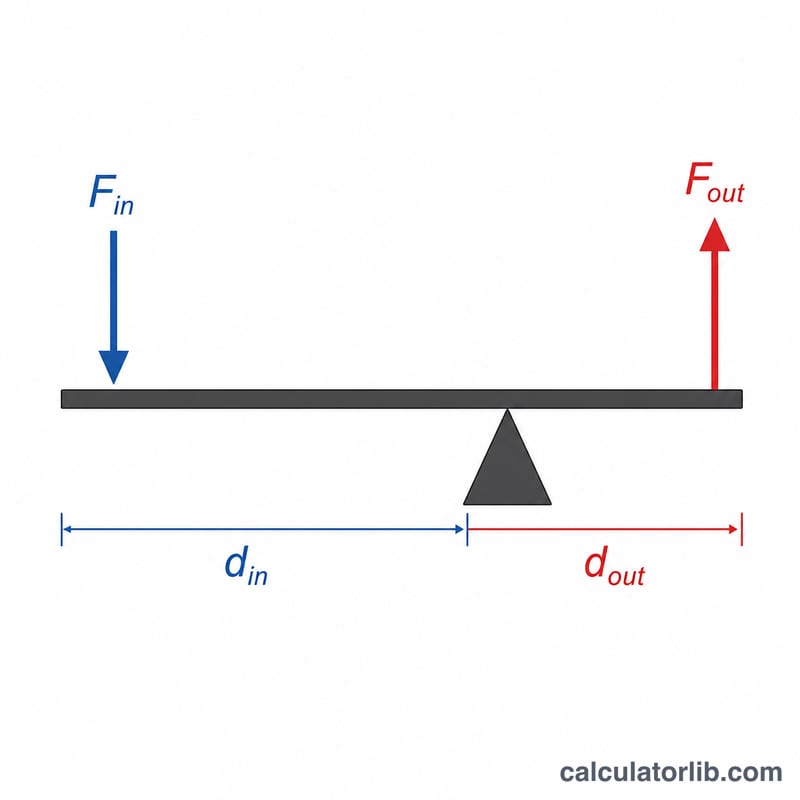
力点アーム=支点から力を加える位置までの距離(\(d_{in}\))と、荷重アーム=支点から荷重までの距離(\(d_{out}\))を入力してください。長さの単位は同じものであれば何でも構いません。加える力(\(F_{in}\))を入力すれば、その結果として得られる荷重の力も表示されます。機械的倍率は、てこが加えた力を何倍にしてくれるかを示します。
計算式の解説
モーメントのつり合いの原理によれば、つり合ったてこは次を満たします。
$$F_{in} \cdot d_{in} = F_{out} \cdot d_{out}$$これを変形すると、機械的倍率は次のようになります。
$$MA = \frac{d_{in}}{d_{out}} = \frac{F_{out}}{F_{in}}$$MAが1より大きければ、てこは力を増幅します(その代わりに移動距離は短くなります)。1より小さい場合は、力ではなく移動距離や速さを増幅することになります。
計算例
バールの力点アームが100cm、荷重アームが25cmだとします。
$$MA = \frac{100}{25} = 4$$50Nの力で押すと、荷重にかかる力は次のようになり、
$$50 \times 4 = 200\,\text{N}$$加えた力が4倍になります。
よくある質問
どの単位を使えばいいですか? 単位がそろっていれば何でも構いません。腕の長さは互いに同じ単位であればよく、力は入力したそのままの単位(N、lbf、kg重など)で計算されます。
MAが1より小さいとどういう意味ですか? てこが力を小さくする代わりに、速さや動く範囲を大きくしていることを意味します。人間の前腕や釣り竿などの第3種のてこに典型的に見られます。
摩擦や棒の重さは考慮されますか? いいえ。これは棒が剛体で重さがなく、支点に摩擦がないと仮定した理想モデルです。設計や宿題の問題の大半には十分な精度です。