À quoi sert ce calculateur
Cet outil calcule le déplacement x(t) d'un oscillateur harmonique amorti à une dimension, lâché sans vitesse initiale depuis un déplacement initial x0. Il résout l'équation du mouvement classique normalisée par la masse et tabule la position sur quatre périodes propres : vous visualisez ainsi précisément comment le système revient à l'équilibre. Il indique également si le comportement est sous-amorti, à amortissement critique ou sur-amorti.
L'équation du mouvement
Le mouvement obéit à l'équation différentielle ordinaire linéaire \(\frac{d^2x}{dt^2} + 2k\frac{dx}{dt} + \omega_0^2 x = 0\), où \(\omega_0\) est la pulsation propre non amortie et \(k\) le coefficient de résistance (amortissement), tous deux exprimés en 1/s. Avec les conditions initiales \(x(0) = \text{x}_0\) et \(\frac{dx}{dt}(0) = 0\), la solution analytique dépend de la comparaison entre \(k\) et \(\omega_0\).
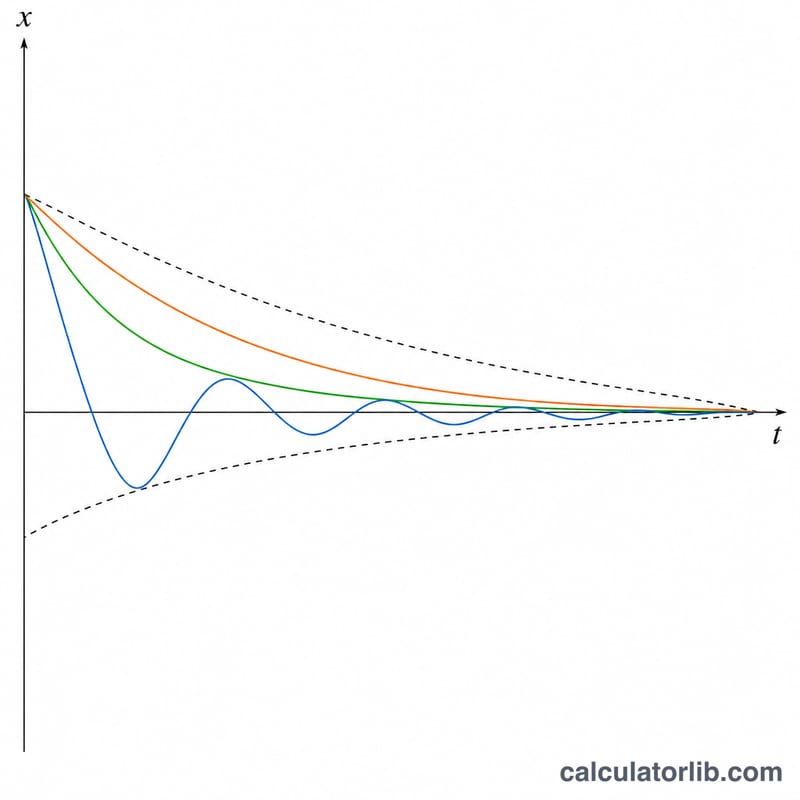
Lorsque \(k < \omega_0\), le système est sous-amorti : il oscille à une pulsation amortie réduite \(\omega_d = \sqrt{\omega_0^2 - k^2}\), l'amplitude décroissant en \(e^{-kt}\) :
$$x(t) = \text{x}_0\, e^{-kt}\left(\cos\omega_d t + \frac{k}{\omega_d}\sin\omega_d t\right)\quad,\quad \omega_d = \sqrt{\omega_0^{2} - k^{2}}$$Lorsque \(k = \omega_0\), le système est en amortissement critique et revient au repos le plus rapidement possible, sans osciller :
$$x(t) = \text{x}_0\left(1 + \omega_0\, t\right) e^{-\omega_0\, t}$$Lorsque \(k > \omega_0\), le système est sur-amorti et retourne lentement à l'équilibre, sans aucune oscillation :
$$x(t) = \frac{\text{x}_0}{2\omega_d}\left[(\omega_d + k)\, e^{(\omega_d - k)t} + (\omega_d - k)\, e^{-(\omega_d + k)t}\right]\quad,\quad \omega_d = \sqrt{k^{2} - \omega_0^{2}}$$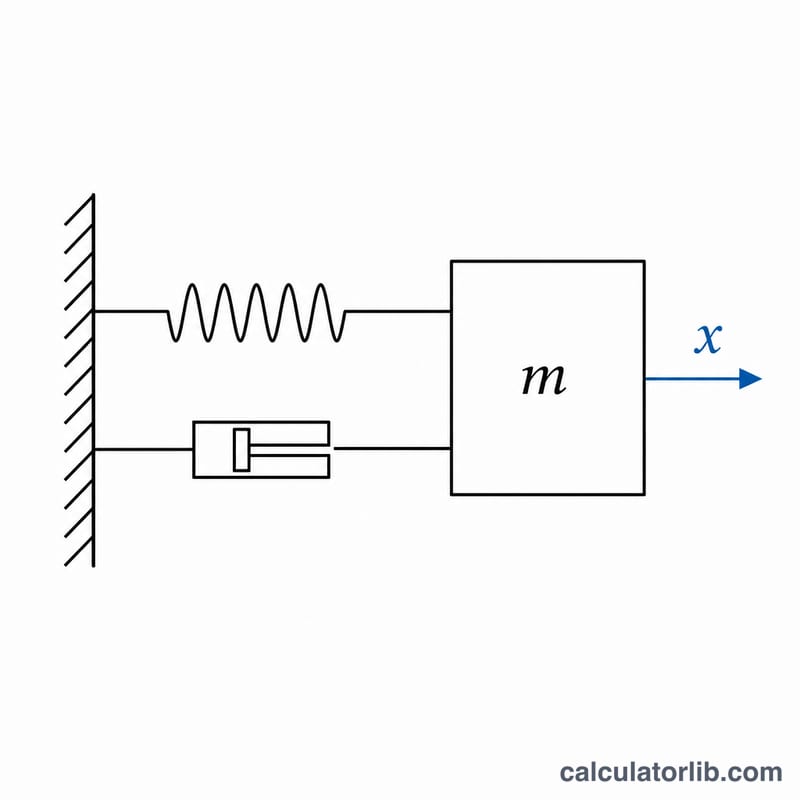
Comment l'utiliser
Saisissez la pulsation propre non amortie \(\omega_0\) (qui doit être strictement positive), le coefficient d'amortissement \(k\) (nul ou positif, sachant que \(k = 0\) correspond à un mouvement purement non amorti), le déplacement initial \(\text{x}_0\) et le nombre de subdivisions temporelles du tableau. La période propre vaut \(T_0 = \frac{2\pi}{\omega_0}\) ; le tableau couvre \(4 T_0\) par pas égaux \(dt = \frac{\text{duréeTotale}}{\text{subdivisions}}\), ce qui donne subdivisions+1 lignes.
Exemple détaillé
Pour \(\omega_0 = 5\), \(k = 1\), \(\text{x}_0 = 1\) et 50 subdivisions, le régime est sous-amorti avec \(\omega_d = \sqrt{25 - 1} = 4{,}89898\) rad/s. La période propre est de 1,256637 s, la durée couverte est de 5,026548 s et \(dt = 0{,}100531\) s. À \(t = 0\), le déplacement vaut 1 ; au premier pas, \(t = 0{,}100531\) s, il vaut environ 0,884153.
FAQ
Que représente le coefficient d'amortissement \(k\) ? C'est le terme de demi-amortissement normalisé par la masse ; la force de résistance par unité de masse est égale à \(2k\) multiplié par la vitesse.
Que se passe-t-il si \(k\) est exactement égal à \(\omega_0\) ? Les formes sous-amortie et sur-amortie présentent une singularité éliminable en ce point : l'outil applique donc la formule de l'amortissement critique dès que \(k\) se trouve dans une tolérance infime de \(\omega_0\).
Pourquoi exactement quatre périodes ? Quatre périodes propres suffisent à montrer l'enveloppe complète de la décroissance tout en gardant un tableau compact et lisible.