Qué hace esta calculadora
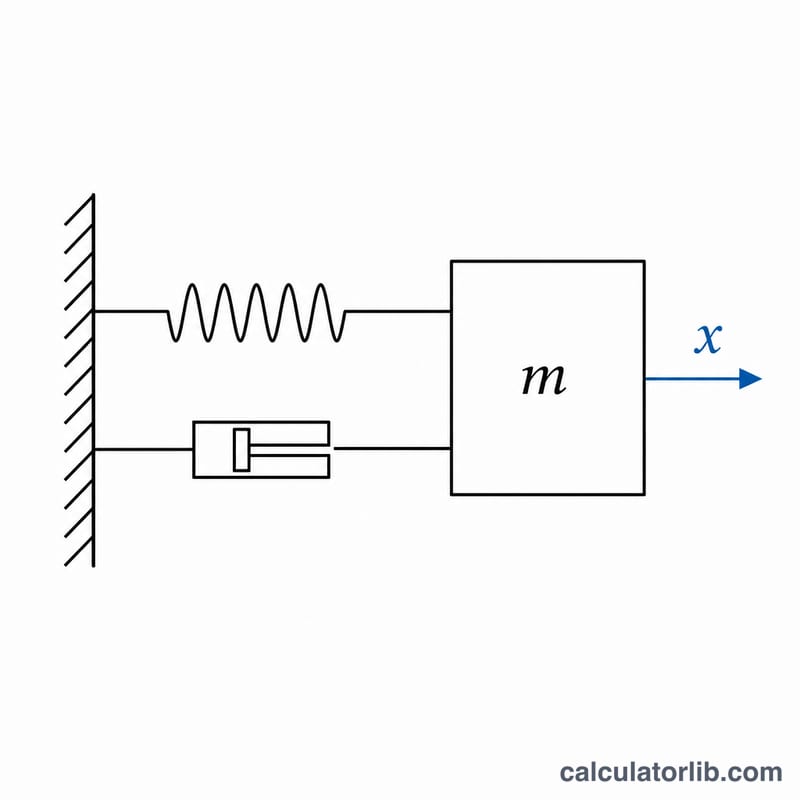
Esta herramienta calcula el desplazamiento \(x(t)\) de un oscilador armónico amortiguado unidimensional que se libera desde el reposo en un desplazamiento inicial \(x_0\). Resuelve la ecuación de movimiento estándar normalizada por la masa y tabula la posición a lo largo de cuatro periodos naturales, de modo que puedes ver con exactitud cómo el sistema tiende hacia el equilibrio. Además, clasifica el comportamiento como subamortiguado, críticamente amortiguado o sobreamortiguado.
La ecuación que rige el movimiento
El movimiento obedece a la ecuación diferencial ordinaria lineal $$\frac{d^2x}{dt^2} + 2k\frac{dx}{dt} + \omega_0^2 x = 0,$$ donde \(\omega_0\) es la frecuencia angular natural (sin amortiguar) y \(k\) es el coeficiente de resistencia (amortiguamiento), ambos expresados en unidades de \(1/s\). Con las condiciones iniciales \(x(0) = x_0\) y \(\frac{dx}{dt}(0) = 0\), la solución analítica depende de cómo se compare \(k\) con \(\omega_0\).
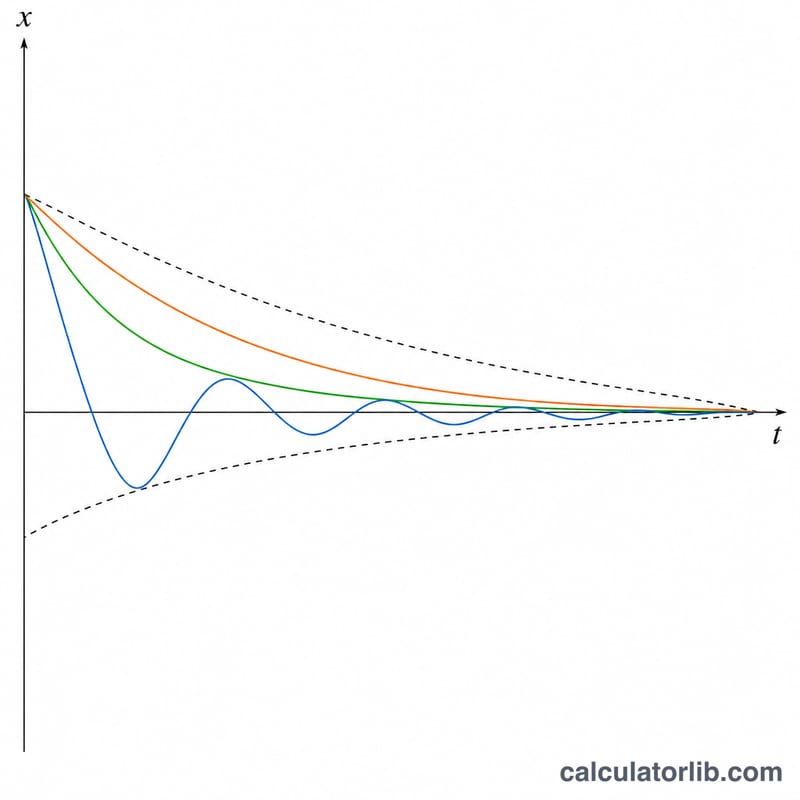
Cuando \(k < \omega_0\), el sistema está subamortiguado y oscila con una frecuencia angular amortiguada reducida \(\omega_d = \sqrt{\omega_0^2 - k^2}\), mientras la amplitud decae según \(e^{-kt}\): $$x(t) = \text{x}_0\, e^{-kt}\left(\cos\omega_d t + \frac{k}{\omega_d}\sin\omega_d t\right)\quad,\quad \omega_d = \sqrt{\omega_0^{2} - k^{2}}$$ Cuando \(k = \omega_0\), el sistema está críticamente amortiguado y vuelve al reposo lo más rápido posible sin oscilar: $$x(t) = \text{x}_0\left(1 + \omega_0\, t\right) e^{-\omega_0\, t}$$ Cuando \(k > \omega_0\), el sistema está sobreamortiguado y regresa lentamente al equilibrio sin oscilación alguna: $$x(t) = \frac{\text{x}_0}{2\omega_d}\left[(\omega_d + k)\, e^{(\omega_d - k)t} + (\omega_d - k)\, e^{-(\omega_d + k)t}\right]\quad,\quad \omega_d = \sqrt{k^{2} - \omega_0^{2}}$$
Cómo usarla
Introduce la frecuencia angular natural \(\omega_0\) (debe ser mayor que cero), el coeficiente de amortiguamiento \(k\) (cero o más, donde \(k = 0\) da un movimiento puramente sin amortiguar), el desplazamiento inicial \(x_0\) y el número de divisiones temporales de la tabla. El periodo natural es \(T_0 = 2\pi/\omega_0\); la tabla abarca \(4 T_0\) en pasos iguales de \(dt = \text{intervalo}/\text{divisiones}\), lo que genera divisiones+1 filas.
Ejemplo resuelto
Para \(\omega_0 = 5\), \(k = 1\), \(x_0 = 1\) y 50 divisiones, el régimen es subamortiguado con \(\omega_d = \sqrt{25 - 1} = 4.89898\ \text{rad/s}\). El periodo natural es \(1.256637\ \text{s}\), el intervalo es \(5.026548\ \text{s}\) y \(dt = 0.100531\ \text{s}\). En \(t = 0\) el desplazamiento vale \(1\); en el primer paso, \(t = 0.100531\ \text{s}\), es de aproximadamente \(0.884153\).
Preguntas frecuentes
¿Qué representa el coeficiente de amortiguamiento \(k\)? Es el término de medio amortiguamiento normalizado por la masa; la fuerza resistiva por unidad de masa es igual a \(2k\) multiplicado por la velocidad.
¿Qué ocurre si \(k\) es exactamente igual a \(\omega_0\)? Las fórmulas de los casos subamortiguado y sobreamortiguado presentan ahí una singularidad evitable, por lo que la herramienta aplica la fórmula del amortiguamiento crítico siempre que \(k\) esté dentro de una tolerancia mínima respecto a \(\omega_0\).
¿Por qué exactamente cuatro periodos? Cuatro periodos naturales bastan para mostrar la envolvente completa del decaimiento, manteniendo a la vez la tabla compacta y fácil de leer.