这个计算器能做什么
本工具用于计算一维阻尼谐振子的位移 \(x(t)\)。系统从初始位移 \(x_0\) 处静止释放,工具求解经过质量归一化的标准运动方程,并在 4 个固有周期内逐点列出位置数据,让你清楚地看到系统如何逐渐回到平衡位置。同时,它还会自动判断振动属于欠阻尼、临界阻尼还是过阻尼。
控制方程
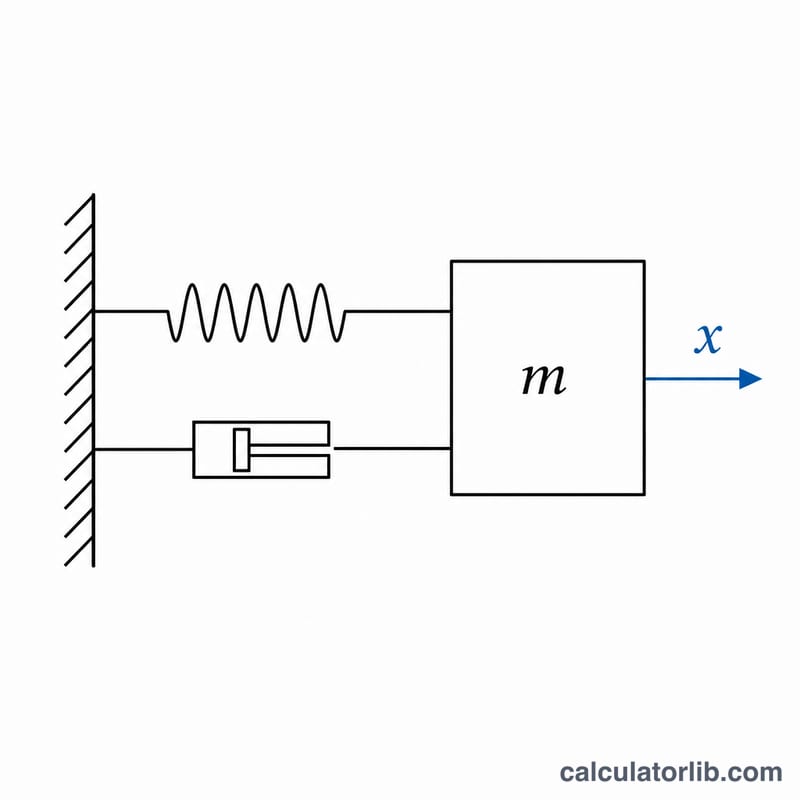
系统的运动满足线性常微分方程 $$\frac{d^2x}{dt^2} + 2k\frac{dx}{dt} + \omega_0^2 x = 0,$$ 其中 \(\omega_0\) 为无阻尼角频率,\(k\) 为阻力(阻尼)系数(二者单位均为 \(1/\text{s}\))。在初始条件 \(x(0) = x_0\) 与 \(\frac{dx}{dt}(0) = 0\) 下,解析解的形式取决于 \(k\) 与 \(\omega_0\) 的相对大小。
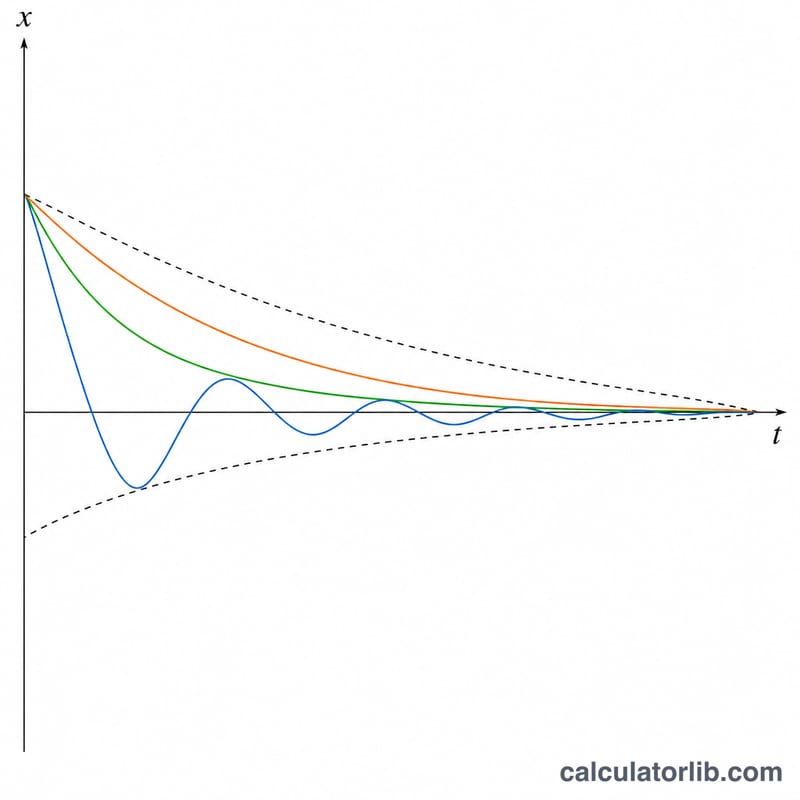
当 \(k < \omega_0\) 时为欠阻尼,系统以减小后的阻尼角频率 \(\omega_d = \sqrt{\omega_0^2 - k^2}\) 振荡,振幅按 \(e^{-kt}\) 衰减: $$x(t) = x_0\, e^{-kt}\left(\cos\omega_d t + \frac{k}{\omega_d}\sin\omega_d t\right)\quad,\quad \omega_d = \sqrt{\omega_0^{2} - k^{2}}$$ 当 \(k = \omega_0\) 时为临界阻尼,系统不振荡,以最快速度回到静止: $$x(t) = x_0\left(1 + \omega_0\, t\right) e^{-\omega_0\, t}$$ 当 \(k > \omega_0\) 时为过阻尼,系统缓慢地"爬"回平衡位置,不发生振荡: $$x(t) = \frac{x_0}{2\omega_d}\left[(\omega_d + k)\, e^{(\omega_d - k)t} + (\omega_d - k)\, e^{-(\omega_d + k)t}\right]\quad,\quad \omega_d = \sqrt{k^{2} - \omega_0^{2}}$$
使用方法
输入无阻尼角频率 \(\omega_0\)(必须大于零)、阻尼系数 \(k\)(取零或正值,\(k = 0\) 表示纯无阻尼运动)、初始位移 \(x_0\),以及数据表的时间分段数。固有周期为 \(T_0 = 2\pi/\omega_0\);数据表覆盖 \(4 T_0\),按等步长 \(dt = \text{timeSpan}/\text{divisions}\) 划分,共生成 \(\text{divisions}+1\) 行。
算例演示
取 \(\omega_0 = 5\)、\(k = 1\)、\(x_0 = 1\),分为 50 段时,系统处于欠阻尼状态,\(\omega_d = \sqrt{25 - 1} = 4.89898\ \text{rad/s}\)。固有周期为 \(1.256637\ \text{s}\),时间跨度为 \(5.026548\ \text{s}\),步长 \(dt = 0.100531\ \text{s}\)。在 \(t = 0\) 时位移为 \(1\);在第一步 \(t = 0.100531\ \text{s}\) 时位移约为 \(0.884153\)。
常见问题
阻尼系数 \(k\) 代表什么?它是经过质量归一化的半阻尼项;单位质量上受到的阻力等于 \(2k\) 乘以速度。
如果 \(k\) 恰好等于 \(\omega_0\) 会怎样?此时欠阻尼与过阻尼的表达式存在可去奇点,因此只要 \(k\) 落在 \(\omega_0\) 的极小容差范围内,工具就会自动改用临界阻尼公式。
为什么恰好取四个周期?四个固有周期既足以完整展示衰减包络,又能让数据表保持紧凑、易读。