這個計算器能做什麼
本工具用於計算一維阻尼諧振子的位移 \(x(t)\),假設系統從初始位移 \(\text{x}_0\) 處靜止釋放。它求解標準的(以質量歸一化的)運動方程式,並將位移在四個自然週期內逐點列表,讓你清楚看到系統如何逐漸回到平衡位置。同時,工具還會自動判別系統屬於欠阻尼、臨界阻尼或過阻尼。
主導方程式
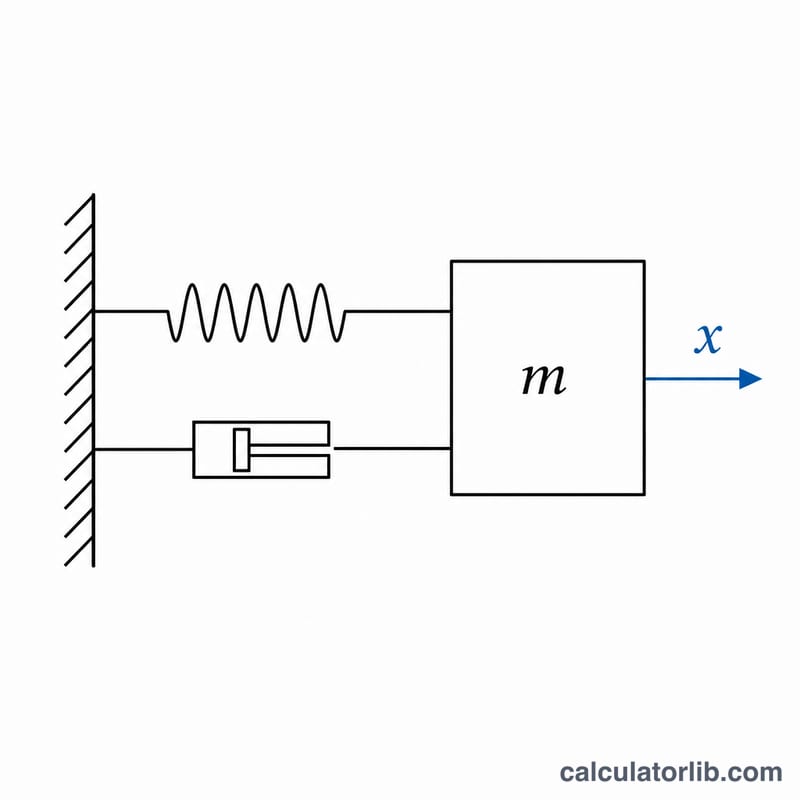
運動遵循線性常微分方程式 $$\frac{d^2x}{dt^2} + 2k\frac{dx}{dt} + \omega_0^2 x = 0$$ 其中 \(\omega_0\) 為無阻尼角頻率,\(k\) 為阻力(阻尼)係數(兩者單位皆為 \(1/\text{s}\))。在初始條件 \(x(0) = \text{x}_0\) 與 \(\frac{dx}{dt}(0) = 0\) 之下,封閉解的形式取決於 \(k\) 與 \(\omega_0\) 的大小關係。
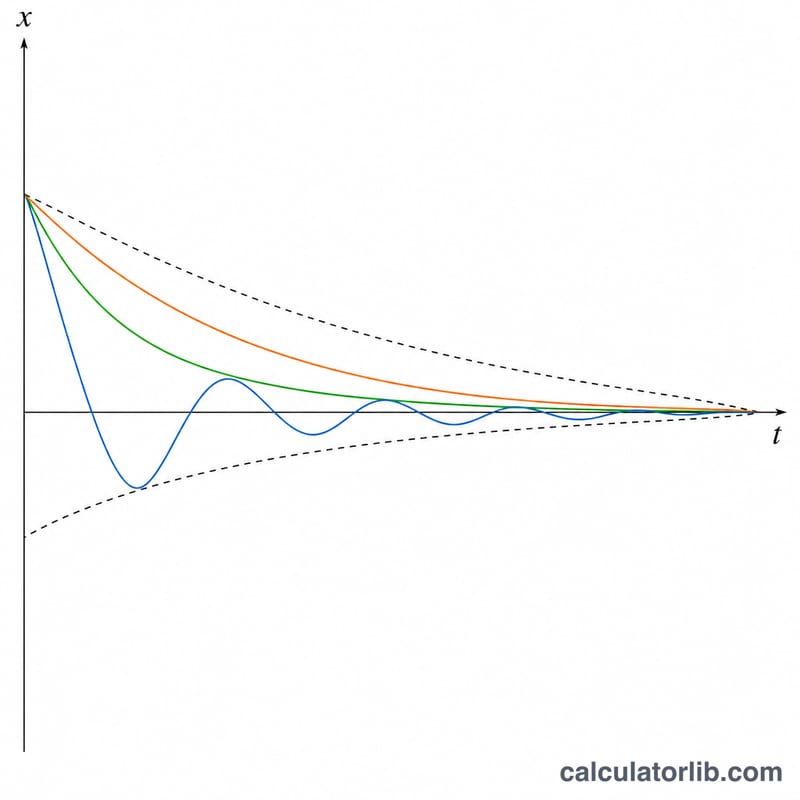
當 \(k < \omega_0\) 時,系統為欠阻尼,會以較低的阻尼角頻率 \(\omega_d = \sqrt{\omega_0^2 - k^2}\) 振盪,且振幅依 \(e^{-kt}\) 衰減。當 \(k = \omega_0\) 時,系統為臨界阻尼,能在不振盪的前提下以最快速度回到靜止:$$x(t) = \text{x}_0\left(1 + \omega_0\, t\right) e^{-\omega_0\, t}$$ 當 \(k > \omega_0\) 時,系統為過阻尼,會緩慢爬回平衡而不發生振盪。
使用方式
輸入無阻尼角頻率 \(\omega_0\)(必須大於零)、阻尼係數 \(k\)(大於或等於零,\(k = 0\) 表示純粹無阻尼運動)、初始位移 \(\text{x}_0\),以及數據表的時間分割數。自然週期為 \(T_0 = \frac{2\pi}{\omega_0}\);表格範圍涵蓋 \(4 T_0\),並以相等的步長 \(dt = \frac{\text{timeSpan}}{\text{divisions}}\) 切分,因此會產生 \(\text{divisions}+1\) 列資料。
實際範例
當 \(\omega_0 = 5\)、\(k = 1\)、\(\text{x}_0 = 1\)、分割數為 \(50\) 時,系統屬於欠阻尼,阻尼角頻率 \(\omega_d = \sqrt{25 - 1} = 4.89898\ \text{rad/s}\)。自然週期為 \(1.256637\) 秒,總時間範圍為 \(5.026548\) 秒,\(dt = 0.100531\) 秒。在 \(t = 0\) 時位移為 \(1\);在第一步 \(t = 0.100531\) 秒時,位移約為 \(0.884153\)。
常見問題
阻尼係數 \(k\) 代表什麼?它是以質量歸一化的「半阻尼」項;每單位質量所受的阻力等於 \(2k\) 乘以速度。
如果 \(k\) 剛好等於 \(\omega_0\) 會怎樣?在這一點上,欠阻尼與過阻尼的公式會出現可去奇異點,因此只要 \(k\) 落在極小的容差範圍內接近 \(\omega_0\),工具就會改用臨界阻尼公式。
為什麼剛好取四個週期?四個自然週期已足以呈現完整的衰減包絡,同時又能讓表格保持精簡、易於閱讀。