この計算ツールでできること
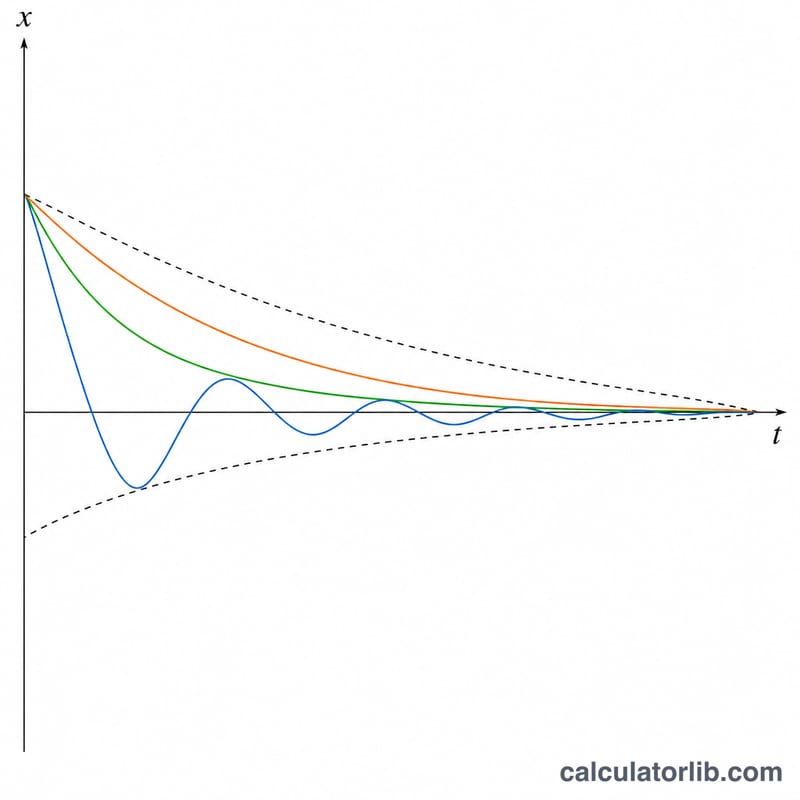
このツールは、初期変位x0の位置から静止状態で放した1次元の減衰調和振動子について、変位x(t)を計算します。質量で規格化した標準的な運動方程式を解き、固有周期の4周期分にわたって位置を表にまとめるため、系がどのように平衡位置へ収束していくかを正確に確認できます。さらに、振動のふるまいを「減衰振動(不足減衰)」「臨界減衰」「過減衰」のいずれかに自動で判定します。
支配方程式
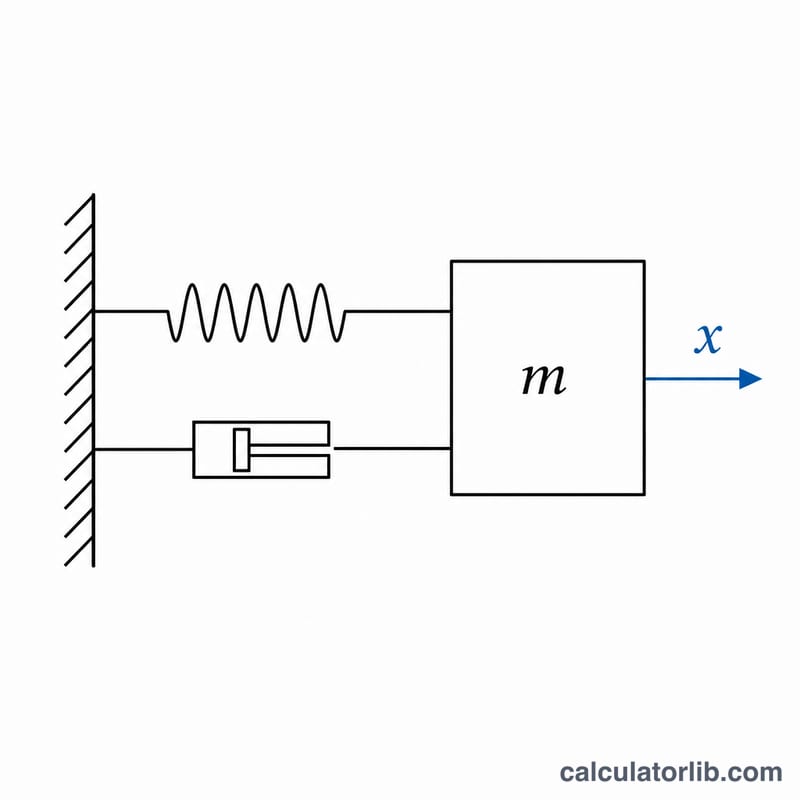
この運動は、線形の常微分方程式 \(\frac{d^2x}{dt^2} + 2k\frac{dx}{dt} + \omega_0^2 x = 0\) に従います。ここでw0は減衰のない場合の角振動数、kは抵抗(減衰)係数で、いずれも単位は 1/s です。初期条件 \(x(0) = \text{x}_0\)、\(\frac{dx}{dt}(0) = 0\) のもとでは、解の形はkとw0の大小関係によって変わります。
k < w0 のときは不足減衰(減衰振動)となり、減衰角振動数 \(\omega_d = \sqrt{\omega_0^2 - k^2}\) で振動しながら、振幅が \(e^{-kt}\) に従って減衰します:$$x(t) = \text{x}_0\, e^{-kt}\left(\cos\omega_d t + \frac{k}{\omega_d}\sin\omega_d t\right)\quad,\quad \omega_d = \sqrt{\omega_0^{2} - k^{2}}$$ k = w0 のときは臨界減衰となり、振動することなく最も速やかに静止状態へ戻ります:$$x(t) = \text{x}_0\left(1 + \omega_0\, t\right) e^{-\omega_0\, t}$$ k > w0 のときは過減衰となり、振動せずにゆっくりと元の位置へ戻っていきます:$$x(t) = \frac{\text{x}_0}{2\omega_d}\left[(\omega_d + k)\, e^{(\omega_d - k)t} + (\omega_d - k)\, e^{-(\omega_d + k)t}\right]\quad,\quad \omega_d = \sqrt{k^{2} - \omega_0^{2}}$$
使い方
減衰のない場合の角振動数w0(0より大きい値)、減衰係数k(0以上の値。k = 0 のときは減衰のない純粋な振動になります)、初期変位x0、そして表の分割数を入力します。固有周期は \(T_0 = \frac{2\pi}{\omega_0}\) で、表は \(4\cdot T_0\) の範囲を等間隔で刻み、刻み幅は \(dt = \frac{\text{計算時間}}{\text{分割数}}\) となります。行数は分割数+1行になります。
計算例
w0 = 5、k = 1、x0 = 1、分割数50の場合、ふるまいは不足減衰となり、減衰角振動数は \(\omega_d = \sqrt{25 - 1} = 4.89898\ \text{rad/s}\) です。固有周期は 1.256637 s、計算範囲は 5.026548 s、刻み幅は \(dt = 0.100531\ \text{s}\) となります。t = 0 では変位は1、最初の刻み t = 0.100531 s では約 0.884153 になります。
よくある質問
減衰係数kは何を表していますか? 質量で規格化した減衰項の半分の値です。単位質量あたりの抵抗力は、速度の2k倍に等しくなります。
kがちょうどw0と等しい場合はどうなりますか? 不足減衰と過減衰の式はこの点で見かけ上の特異点を持ちますが(実際には除去可能)、本ツールではkがw0にごくわずかな許容範囲内まで近づいた場合に臨界減衰の式を用います。
なぜちょうど4周期なのですか? 固有周期の4周期分は、減衰の包絡線(全体の減衰の様子)を十分に見せられる長さでありながら、表をコンパクトで見やすく保てるためです。