方位角计算器是什么?
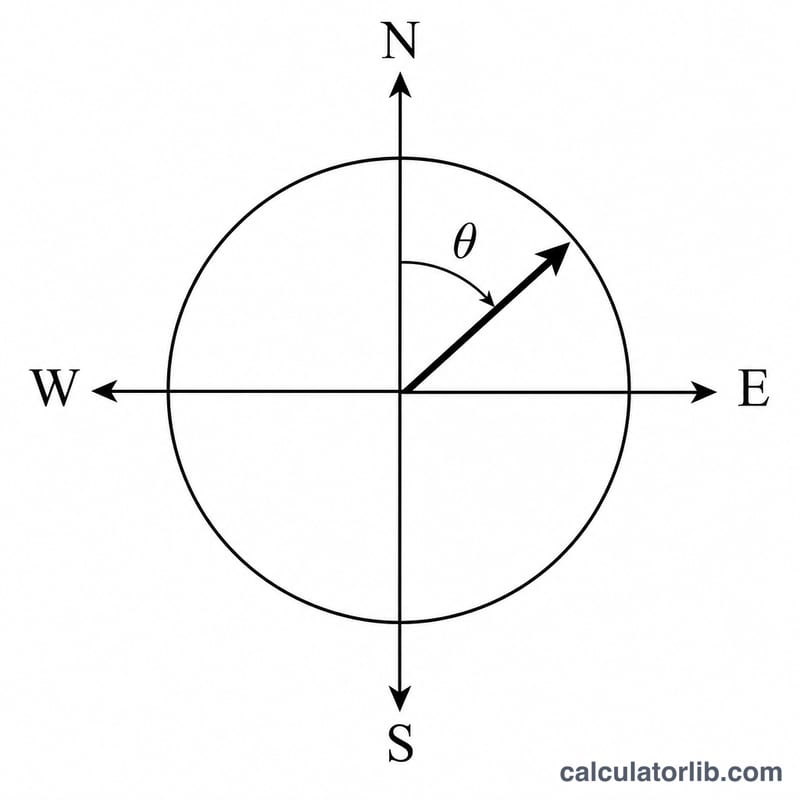
本工具用于计算地球上两个经纬度点之间的初始方位角(也称为前向方位)。方位角是指以真北(0°)为起点、按顺时针方向测量的水平夹角,表示沿最短大圆航线前往目的地时应朝向的方向。其中正东为90°、正南为180°、正西为270°。
如何使用
分别填入起点和终点的纬度与经度,均使用十进制度数。南纬和西经请使用负值(例如纽约为40.7128,−74.0060)。计算器会返回以度数表示的方位角,以及最接近的16方位罗盘方向。
公式解析
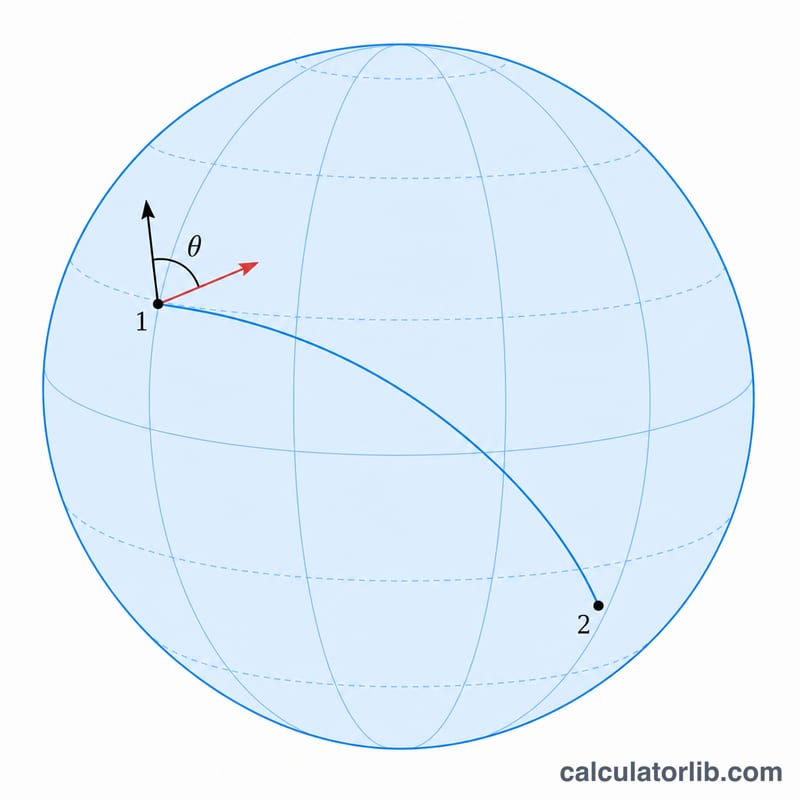
方位角由球面三角学推导而来。设φ为纬度、λ为经度、Δλ为经度差,则方向角为 $$\theta = \operatorname{atan2}\!\left( \sin\Delta\lambda \cdot \cos\varphi_2,\; \cos\varphi_1 \cdot \sin\varphi_2 - \sin\varphi_1 \cdot \cos\varphi_2 \cdot \cos\Delta\lambda \right)$$。由于 atan2 返回的取值范围为 \(-180^\circ\) 至 \(180^\circ\),因此需加上360°并取模,将结果转换为 \(0^\circ\)–\(360^\circ\) 的罗盘刻度。请注意,这是初始方位角:在大圆航线上,航向会持续变化,因此它与抵达目的地时的最终方位角并不相同。
实例演算
从纽约(40.7128,−74.0060)飞往伦敦(51.5074,−0.1278):\(\Delta\lambda = 73.8782^\circ\)。代入公式得 \(y = \sin(\Delta\lambda)\cdot\cos(\varphi_2) \approx 0.5970\),\(x \approx 0.2113\),于是 $$\theta = \operatorname{atan2}(0.5970,\; 0.2113) \approx 70.5^\circ$$。采用完整精度计算得到的方位角约为 51°,指向东北偏东(ENE)——这条大圆航线会在大西洋上方向北弯曲。
方位角至罗盘方向参考
方位角从真北(0°)顺时针测量,经过东(90°)、南(180°)和西(270°),最后回到北(360°)。32点罗盘和16点罗盘分别细分圆形;下面的16点罗盘为每个命名方向分配一个中心方位,间隔为22.5°,每个方向"拥有"围绕其中心延伸±11.25°的范围。
| 罗盘方向 | 缩写 | 中心方位角 | 度数范围 |
|---|---|---|---|
| 北 | N | 0° / 360° | 348.75°–11.25° |
| 北偏东北 | NNE | 22.5° | 11.25°–33.75° |
| 东北 | NE | 45° | 33.75°–56.25° |
| 东偏东北 | ENE | 67.5° | 56.25°–78.75° |
| 东 | E | 90° | 78.75°–101.25° |
| 东偏东南 | ESE | 112.5° | 101.25°–123.75° |
| 东南 | SE | 135° | 123.75°–146.25° |
| 南偏东南 | SSE | 157.5° | 146.25°–168.75° |
| 南 | S | 180° | 168.75°–191.25° |
| 南偏西南 | SSW | 202.5° | 191.25°–213.75° |
| 西南 | SW | 225° | 213.75°–236.25° |
| 西偏西南 | WSW | 247.5° | 236.25°–258.75° |
| 西 | W | 270° | 258.75°–281.25° |
| 西偏西北 | WNW | 292.5° | 281.25°–303.75° |
| 西北 | NW | 315° | 303.75°–326.25° |
| 北偏西北 | NNW | 337.5° | 326.25°–348.75° |
关键术语与变量
- 方位角(正向方位) — 从北方向顺时针测量的水平角度,指向沿大圆路径从起点到目的地的方向。以0°至360°的度数表示。
- 真北 — 沿地表指向地球地理北极(旋转轴)的方向。此处的方位角公式返回相对于真北的方向。
- 磁北 — 指南针指针指向的方向,指向地磁北极。它与真北的差异由当地磁偏角决定。
- 磁偏角 — 在给定位置真北与磁北之间的角度。要按指南针方向行进,请转换为:\( \text{磁方位} = \text{真方位} - \text{磁偏角(东偏为正)} \)。
- 大圆 — 球面上两点之间的最短路径;其平面通过地球中心。沿途的初始方向通常持续变化。
- 等角螺线(恒向线) — 以恒定角度穿过每条子午线的路径,提供恒定的罗盘方向。除赤道或子午线外,它比大圆更长。
- 纬度(\(\varphi\)) — 南北角度坐标,范围从\(-90^\circ\)(南极)到\(+90^\circ\)(北极)。此处\(\varphi_1\)为起始纬度,\(\varphi_2\)为终止纬度。
- 经度(\(\lambda\)) — 东西角度坐标,范围从\(-180^\circ\)到\(+180^\circ\),以本初子午线为基准测量。
- \(\Delta\lambda\) — 经度差,\(\lambda_2 - \lambda_1\)。当路径穿过\(180^\circ\)子午线时,使用前将\(\Delta\lambda\)标准化为\(-180^\circ\)到\(+180^\circ\)范围内。
- atan2(y, x) — 二元反正切函数,使用\(y\)和\(x\)的符号返回正确象限内的角度,结果范围为\(-180^\circ\)到\(+180^\circ\);加上\(360^\circ\)并取模\(360^\circ\)将其映射到0–360°的方位角。
- 初始方位与最终方位 — 因为大圆相对于子午线会弯曲,出发时的方向(初始方位)与到达时的方向(最终方位)不同。此计算器返回初始方位。
常见问题
方位角和罗盘航向是一回事吗? 此处的方位角以真北为基准测量;而磁罗盘读取的是磁北方向,因此需要减去当地的磁偏角才能换算。
为什么沿途方位角会变化? 球面上的最短路径是大圆,其相对于北方的方向会随着位置移动而改变,这与保持恒定航向的等角航线(恒向线)不同。
结果的取值范围是多少? \(0^\circ\) 至 \(360^\circ\),从真北起按顺时针方向测量。