What is the Azimuth (Bearing) Calculator?
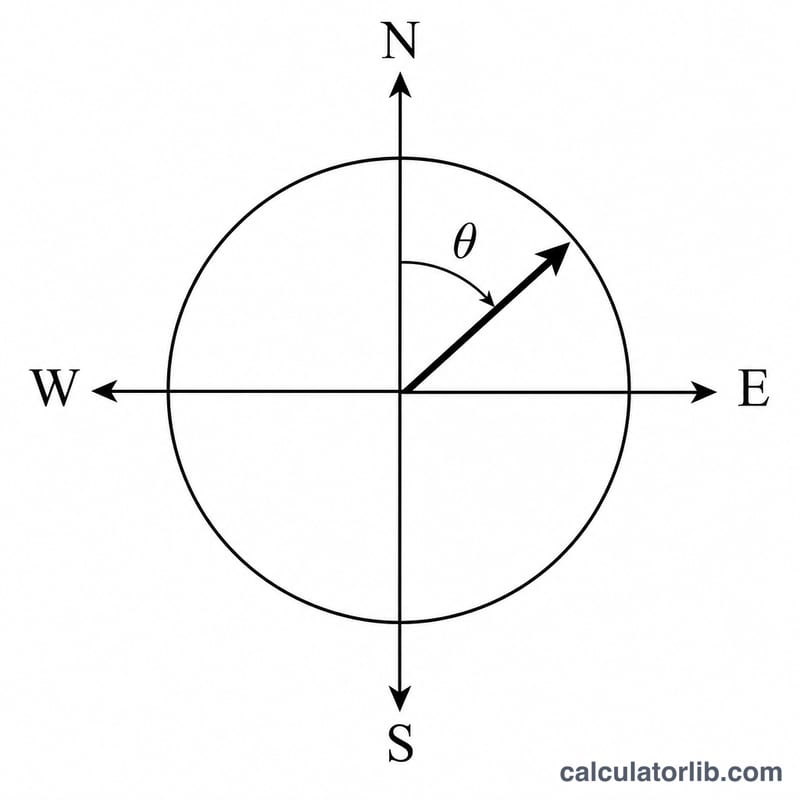
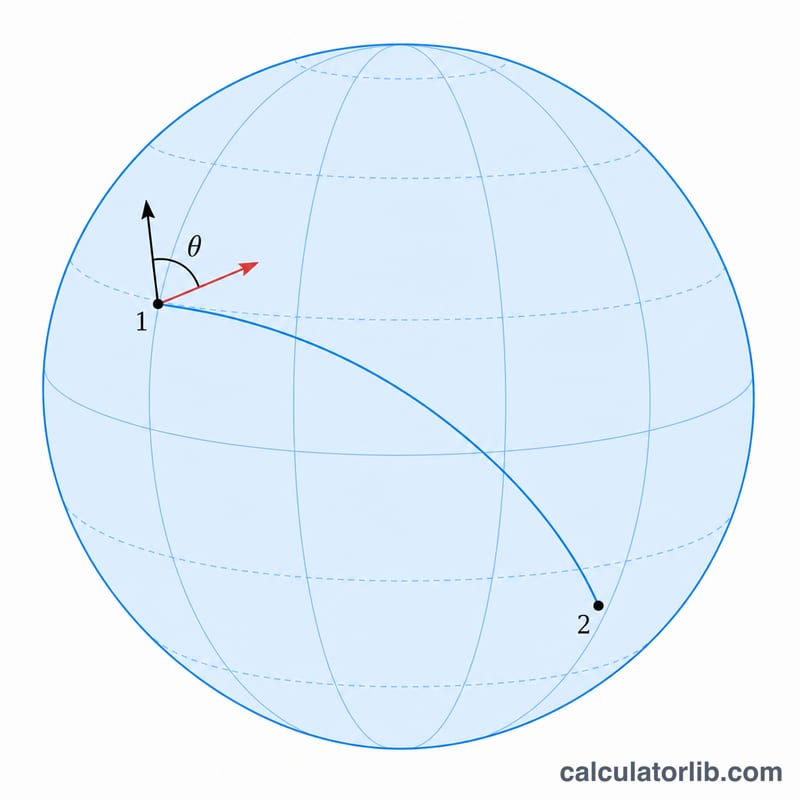
This tool computes the initial azimuth—also called the forward bearing—between two points on Earth given as latitude/longitude pairs. The azimuth is the horizontal angle measured clockwise from true north (0°) toward the direction you must travel to reach your destination along the shortest great-circle path. East is 90°, south is 180°, and west is 270°.
How to use it
Enter the latitude and longitude of your starting point and your destination in decimal degrees. Use negative values for southern latitudes and western longitudes (for example, New York is 40.7128, −74.0060). The calculator returns the bearing in degrees and the nearest 16-point compass direction.
The formula explained
The bearing is derived from spherical trigonometry. With \(\varphi\) as latitude, \(\lambda\) as longitude, and \(\Delta\lambda\) the difference in longitude, the heading is $$\theta = \operatorname{atan2}\!\left( \sin\Delta\lambda \cdot \cos\varphi_2,\; \cos\varphi_1 \cdot \sin\varphi_2 - \sin\varphi_1 \cdot \cos\varphi_2 \cdot \cos\Delta\lambda \right).$$ Because atan2 returns values from \(-180^\circ\) to \(180^\circ\), we add \(360^\circ\) and take the modulus to express the answer on a 0°–360° compass scale. Note this is the initial bearing: along a great circle the heading changes continuously, so it differs from the final bearing at the destination.
Worked example
From New York (40.7128, −74.0060) to London (51.5074, −0.1278): \(\Delta\lambda = 73.8782^\circ\). Plugging in gives $$y = \sin(\Delta\lambda)\cdot\cos(\varphi_2) \approx 0.5970$$ and \(x \approx 0.2113\), so $$\theta = \operatorname{atan2}(0.5970,\, 0.2113) \approx 70.5^\circ.$$ The bearing of roughly 51° obtained with full precision points east-northeast (ENE)—the great-circle route arcs north over the Atlantic.
Azimuth to Compass Point Reference
An azimuth is measured clockwise from true north (0°) through east (90°), south (180°) and west (270°), wrapping back to north at 360°. The 32-point and 16-point compass roses subdivide the circle; the 16-point rose below assigns each named point a center bearing with a 22.5° spacing, and each point "owns" the band that extends ±11.25° around its center.
| Compass Point | Abbr. | Center Azimuth | Degree Range |
|---|---|---|---|
| North | N | 0° / 360° | 348.75°–11.25° |
| North-northeast | NNE | 22.5° | 11.25°–33.75° |
| Northeast | NE | 45° | 33.75°–56.25° |
| East-northeast | ENE | 67.5° | 56.25°–78.75° |
| East | E | 90° | 78.75°–101.25° |
| East-southeast | ESE | 112.5° | 101.25°–123.75° |
| Southeast | SE | 135° | 123.75°–146.25° |
| South-southeast | SSE | 157.5° | 146.25°–168.75° |
| South | S | 180° | 168.75°–191.25° |
| South-southwest | SSW | 202.5° | 191.25°–213.75° |
| Southwest | SW | 225° | 213.75°–236.25° |
| West-southwest | WSW | 247.5° | 236.25°–258.75° |
| West | W | 270° | 258.75°–281.25° |
| West-northwest | WNW | 292.5° | 281.25°–303.75° |
| Northwest | NW | 315° | 303.75°–326.25° |
| North-northwest | NNW | 337.5° | 326.25°–348.75° |
Key Terms & Variables
- Azimuth (forward bearing) — the horizontal angle, measured clockwise from north, that points from the start location toward the destination along the great-circle path. Expressed in degrees from 0° to 360°.
- True north — the direction along the Earth's surface toward the geographic North Pole (the axis of rotation). The azimuth formula here returns headings relative to true north.
- Magnetic north — the direction a compass needle points, toward the north magnetic pole. It differs from true north by the local magnetic declination.
- Magnetic declination — the angle between true north and magnetic north at a given location. To steer by compass, convert: \( \text{magnetic bearing} = \text{true bearing} - \text{declination (east positive)} \).
- Great circle — the shortest path between two points on a sphere; its plane passes through the Earth's center. The initial heading along it generally changes continuously en route.
- Rhumb line (loxodrome) — a path that crosses every meridian at a constant angle, giving a fixed compass heading. It is longer than the great circle except along the equator or a meridian.
- Latitude (\(\varphi\)) — the north–south angular coordinate, from \(-90^\circ\) (South Pole) to \(+90^\circ\) (North Pole). Here \(\varphi_1\) is the start latitude and \(\varphi_2\) the end latitude.
- Longitude (\(\lambda\)) — the east–west angular coordinate, from \(-180^\circ\) to \(+180^\circ\), measured from the prime meridian.
- \(\Delta\lambda\) — the longitude difference, \(\lambda_2 - \lambda_1\). When a path crosses the \(180^\circ\) meridian, normalize \(\Delta\lambda\) into the range \(-180^\circ\) to \(+180^\circ\) before use.
- atan2(y, x) — the two-argument arctangent that returns an angle in the correct quadrant using the signs of both \(y\) and \(x\), giving a result in \(-180^\circ\) to \(+180^\circ\); adding \(360^\circ\) and taking mod \(360^\circ\) maps it to a 0–360° azimuth.
- Initial vs final bearing — because a great circle curves relative to the meridians, the heading at departure (initial bearing) differs from the heading on arrival (final bearing). This calculator returns the initial bearing.
FAQ
Is azimuth the same as compass heading? Azimuth here is measured from true north. A magnetic compass reads from magnetic north, so subtract local magnetic declination to convert.
Why does the bearing change along the route? The shortest path on a sphere is a great circle, whose direction relative to north shifts as you move, unlike a constant-heading rhumb line.
What range does the result use? 0° to 360°, clockwise from true north.