Ce que fait ce calculateur
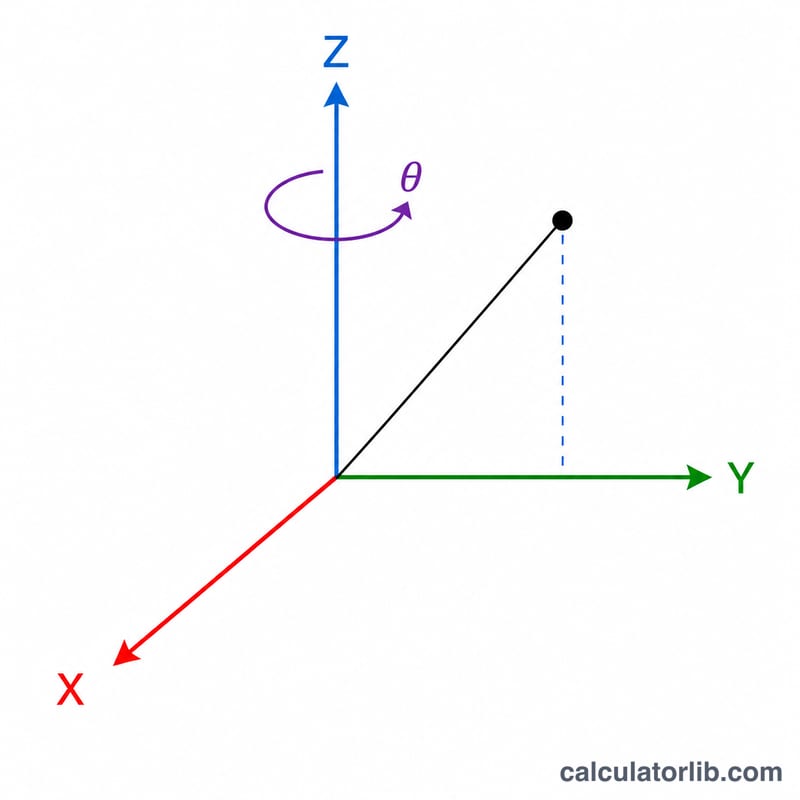
Le calculateur de rotation de coordonnées 3D détermine la nouvelle position d'un point dans l'espace tridimensionnel après l'avoir fait tourner autour de l'axe X, Y et/ou Z. Il s'appuie sur un repère orthonormé direct et sur la convention de signe de la règle de la main droite : un angle positif fait donc tourner le point dans le sens antihoraire lorsque l'on regarde l'extrémité positive de l'axe de rotation en direction de l'origine. Il s'agit de géométrie analytique pure, applicable partout — en physique, en robotique, en infographie, en CAO comme en ingénierie.
Comment l'utiliser
Saisissez les coordonnées de départ (x, y, z initiaux) de votre point. Indiquez si vos angles sont exprimés en degrés ou en radians. Définissez ensuite jusqu'à trois étapes de rotation, chacune avec un axe et un angle. Les étapes s'appliquent dans l'ordre : l'étape 1 agit sur le point d'origine, l'étape 2 sur le résultat de l'étape 1, et ainsi de suite. Laissez un angle vide ou mettez-le à 0 pour ignorer une étape. Pour une rotation unique, il suffit de remplir l'étape 1.
La formule expliquée
Pour chaque étape, soit thêta l'angle en radians, avec \(c = \cos\theta\) et \(s = \sin\theta\). La rotation autour de l'axe Z laisse \(z\) inchangé et transforme \((x, y)\) en \((x\cdot c - y\cdot s,\ x\cdot s + y\cdot c)\). La rotation autour de l'axe Z s'écrit avec la matrice :
$$R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$$La rotation autour de X laisse x fixe ; la rotation autour de Y laisse y fixe, chacune mélangeant les deux autres coordonnées de la même manière.
$$\begin{aligned} x^{\prime} &= x \\ y^{\prime} &= y\cos\theta - z\sin\theta \\ z^{\prime} &= y\sin\theta + z\cos\theta \end{aligned}$$ $$\begin{aligned} x^{\prime} &= x\cos\theta + z\sin\theta,\; y^{\prime}=y,\; z^{\prime}=-x\sin\theta + z\cos\theta \\ x^{\prime} &= x\cos\theta - y\sin\theta,\; y^{\prime}=x\sin\theta + y\cos\theta,\; z^{\prime}=z \end{aligned}$$Composer plusieurs rotations revient à multiplier leurs matrices de rotation, mais les appliquer étape par étape au vecteur évite les erreurs d'ordre.
Exemple concret
Prenons le point (1, 0, 1) et faisons-le tourner de 90° autour de l'axe Z. Ici \(\theta = \pi/2\), donc \(c = 0\) et \(s = 1\). On obtient :
$$x' = 1\cdot 0 - 0\cdot 1 = 0$$ $$y' = 1\cdot 1 + 0\cdot 0 = 1$$et \(z'\) reste inchangé à \(1\). Le résultat est (0, 1, 1).
Valeurs courantes de l'angle de rotation
Les entrées de chaque matrice de rotation dépendent uniquement de \(\cos\theta\) et \(\sin\theta\). Le tableau répertorie les valeurs exactes pour les angles les plus courants afin que vous puissiez les substituer directement dans \(R_X\), \(R_Y\) ou \(R_Z\). Les approximations décimales sont affichées à quatre décimales.
| \(\theta\) (deg) | \(\theta\) (rad) | \(\cos\theta\) | \(\sin\theta\) |
|---|---|---|---|
| 0° | 0 | 1 | 0 |
| 30° | \(\pi/6\) | \(\tfrac{\sqrt3}{2}\approx0,8660\) | \(\tfrac12=0,5\) |
| 45° | \(\pi/4\) | \(\tfrac{\sqrt2}{2}\approx0,7071\) | \(\tfrac{\sqrt2}{2}\approx0,7071\) |
| 60° | \(\pi/3\) | \(\tfrac12=0,5\) | \(\tfrac{\sqrt3}{2}\approx0,8660\) |
| 90° | \(\pi/2\) | 0 | 1 |
| 180° | \(\pi\) | −1 | 0 |
| 270° | \(3\pi/2\) | 0 | −1 |
Notez qu'une rotation de \(180^\circ\) inverse le signe des deux coordonnées perpendiculaires à l'axe, tandis que \(270^\circ\) est équivalent à \(-90^\circ\) (un quart de tour dans le sens des aiguilles d'une montre lorsqu'on regarde vers le bas de l'axe positif).
Termes et variables clés
- Système de coordonnées droitier
- Un repère 3D dans lequel les axes X, Y et Z sont orientés de sorte que pointer les doigts de la main droite de +X vers +Y fait que le pouce pointe selon +Z. La convention mathématique et physique standard ; ces matrices de rotation la supposent.
- Règle de la main droite
- Un moyen mnémonique pour déterminer le sens positif de rotation : pointez le pouce droit le long de l'axe positif de rotation, et la courbure des doigts donne la direction positive (inverse des aiguilles d'une montre) de rotation pour cet axe.
- Matrice de rotation
- Une matrice orthogonale \(3\times3\) de déterminant \(+1\) qui fait tourner les vecteurs autour d'un axe fixe sans changer leur longueur. Ici \(R_X\), \(R_Y\) et \(R_Z\) font tourner autour des axes X, Y et Z respectivement.
- \(\theta\) (thêta), l'angle de rotation
- La quantité de rotation autour de l'axe choisi. Entré en degrés ou radians ; l'outil convertit les degrés en interne avec \(\theta_{\text{rad}} = \theta_{\text{deg}}\cdot\pi/180\) avant d'évaluer \(\cos\theta\) et \(\sin\theta\).
- Axe de rotation
- La ligne fixe (X, Y ou Z) dont les points qui s'y trouvent restent inchangés tandis que tout le reste tourne autour. Dans cet outil, l'axe de chaque étape est sélectionné comme 0 = X, 1 = Y, 2 = Z.
- Direction positive / inverse des aiguilles d'une montre
- Un angle positif produit une rotation inverse des aiguilles d'une montre lorsqu'on regarde depuis l'extrémité positive de l'axe vers l'origine. Un angle négatif l'inverse (sens des aiguilles d'une montre).
- Coordonnées de sortie \(x'\), \(y'\), \(z'\)
- Les composantes du point tournoyant \(\mathbf{p}' = R\,\mathbf{p}\). Avec une ou plusieurs rotations séquentielles, \(\mathbf{p}' = R_{a_3}(\theta_3)\,R_{a_2}(\theta_2)\,R_{a_1}(\theta_1)\,\mathbf{p}\), où la matrice la plus à droite est appliquée en premier.
FAQ
Quel est le sens de rotation positif ? Positif signifie « dans le sens antihoraire » lorsqu'on observe depuis l'extrémité positive de l'axe en regardant vers l'origine (règle de la main droite).
L'ordre des rotations a-t-il une importance ? Oui. Les rotations 3D ne sont pas commutatives : tourner autour de X puis de Z donne généralement un résultat différent de Z puis X. Cet outil applique d'abord l'étape 1.
Pourquoi certains résultats affichent-ils 0 au lieu d'un très petit nombre ? Des valeurs comme \(\cos(90°)\) ne valent pas exactement 0 en virgule flottante ; les sorties proches de zéro sont donc ramenées à 0 par souci de clarté.