ما الذي تقوم به هذه الحاسبة
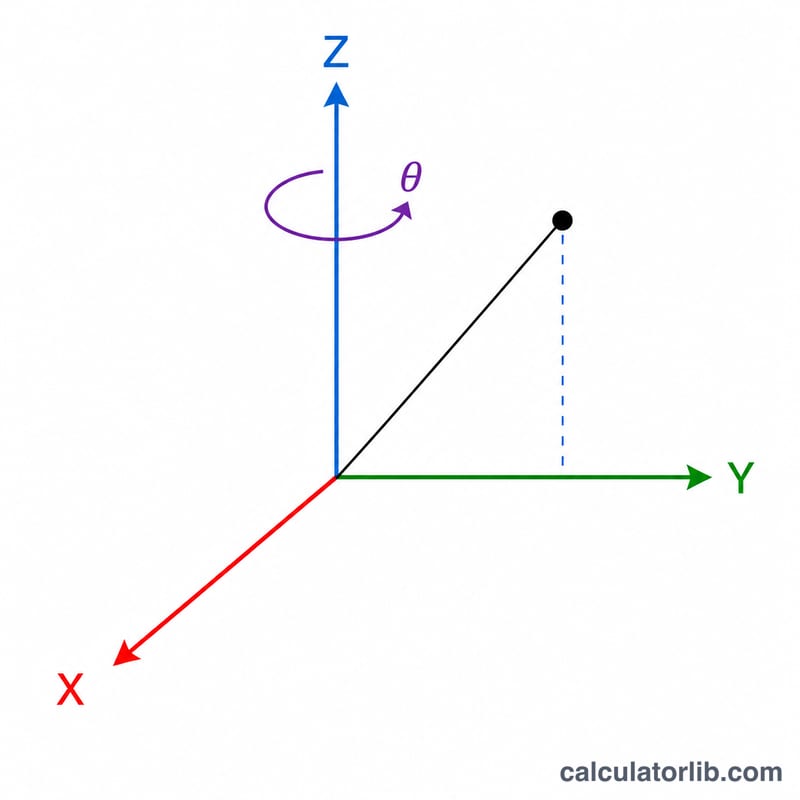
تحدد حاسبة تدوير الإحداثيات ثلاثية الأبعاد الموضع الجديد لنقطة في الفضاء ثلاثي الأبعاد بعد تدويرها حول المحور X و/أو Y و/أو Z. وتعتمد على نظام إحداثيات أيمن واصطلاح إشارة قاعدة اليد اليمنى، بحيث تؤدي الزاوية الموجبة إلى تدوير النقطة عكس عقارب الساعة عند النظر من الطرف الموجب لمحور الدوران باتجاه نقطة الأصل. هذا العمل ينتمي إلى الهندسة التحليلية البحتة وينطبق في كل المجالات — من الفيزياء والروبوتات إلى رسومات الحاسوب والتصميم بمساعدة الحاسوب (CAD) والهندسة.
كيفية الاستخدام
أدخل الإحداثيات الابتدائية للنقطة (x وy وz الابتدائية). ثم اختر ما إذا كانت زواياك بالدرجات أم بالراديان. بعد ذلك حدّد حتى ثلاث خطوات تدوير، لكل منها محور وزاوية. تُطبَّق الخطوات بالترتيب: الخطوة 1 تؤثر في النقطة الأصلية، والخطوة 2 تؤثر في ناتج الخطوة 1، وهكذا. اترك الزاوية فارغة أو اضبطها على 0 لتجاوز تلك الخطوة. وإذا كنت بحاجة إلى تدوير واحد فقط، اكتفِ بملء الخطوة 1.
شرح المعادلة
في كل خطوة، لتكن \(\theta\) هي الزاوية بالراديان، حيث \(c = \cos\theta\) و\(s = \sin\theta\). الدوران حول المحور Z يُبقي قيمة \(z\) ثابتة ويحوّل \((x, y)\) إلى \((x\cdot c - y\cdot s,\ x\cdot s + y\cdot c)\). أما الدوران حول X فيُبقي \(x\) ثابتة، والدوران حول Y يُبقي \(y\) ثابتة، ويمزج كل منهما الإحداثيَّين الآخرَين بالطريقة نفسها. وتركيب عدة دورات يعادل ضرب مصفوفات دورانها، لكن تطبيقها خطوة بخطوة على المتجه يجنّبك أخطاء الترتيب.
$$R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$$
$$\begin{aligned} x^{\prime} &= x \\ y^{\prime} &= y\cos\theta - z\sin\theta \\ z^{\prime} &= y\sin\theta + z\cos\theta \end{aligned}$$
$$\begin{aligned} x^{\prime} &= x\cos\theta + z\sin\theta,\; y^{\prime}=y,\; z^{\prime}=-x\sin\theta + z\cos\theta \\ x^{\prime} &= x\cos\theta - y\sin\theta,\; y^{\prime}=x\sin\theta + y\cos\theta,\; z^{\prime}=z \end{aligned}$$
مثال محلول
لنأخذ النقطة \((1, 0, 1)\) وندوّرها 90° حول المحور Z. هنا \(\theta = \pi/2\)، إذًا \(c = 0\) و\(s = 1\). فيكون \(x' = 1\cdot 0 - 0\cdot 1 = 0\)، و\(y' = 1\cdot 1 + 0\cdot 0 = 1\)، وتبقى \(z'\) دون تغيير عند 1. الناتج هو \((0, 1, 1)\).
قيم زوايا الدوران الشائعة
مدخلات كل مصفوفة دوران تعتمد فقط على \(\cos\theta\) و \(\sin\theta\). يسرد الجدول القيم الدقيقة للزوايا الأكثر شيوعاً حتى تتمكن من استبدالها مباشرة في \(R_X\) أو \(R_Y\) أو \(R_Z\). تُعرض التقريبات العشرية إلى أربعة منازل عشرية.
| \(\theta\) (درجة) | \(\theta\) (راديان) | \(\cos\theta\) | \(\sin\theta\) |
|---|---|---|---|
| 0° | 0 | 1 | 0 |
| 30° | \(\pi/6\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) | \(\tfrac12=0.5\) |
| 45° | \(\pi/4\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) |
| 60° | \(\pi/3\) | \(\tfrac12=0.5\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) |
| 90° | \(\pi/2\) | 0 | 1 |
| 180° | \(\pi\) | −1 | 0 |
| 270° | \(3\pi/2\) | 0 | −1 |
لاحظ أن دوران بزاوية \(180^\circ\) يعكس إشارة الإحداثيتين المتعامدتين مع المحور، بينما \(270^\circ\) يعادل \(-90^\circ\) (ربع دورة بالاتجاه الساعي عند النظر لأسفل المحور الموجب).
المصطلحات والمتغيرات الأساسية
- نظام الإحداثيات اليميني
- إطار ثلاثي الأبعاد حيث تكون محاور X و Y و Z موجهة بحيث أن إشارة أصابع اليد اليمنى من +X باتجاه +Y تجعل الإبهام يشير على طول +Z. وهو الاتفاق الرياضي والفيزيائي القياسي؛ مصفوفات الدوران هذه تفترضه.
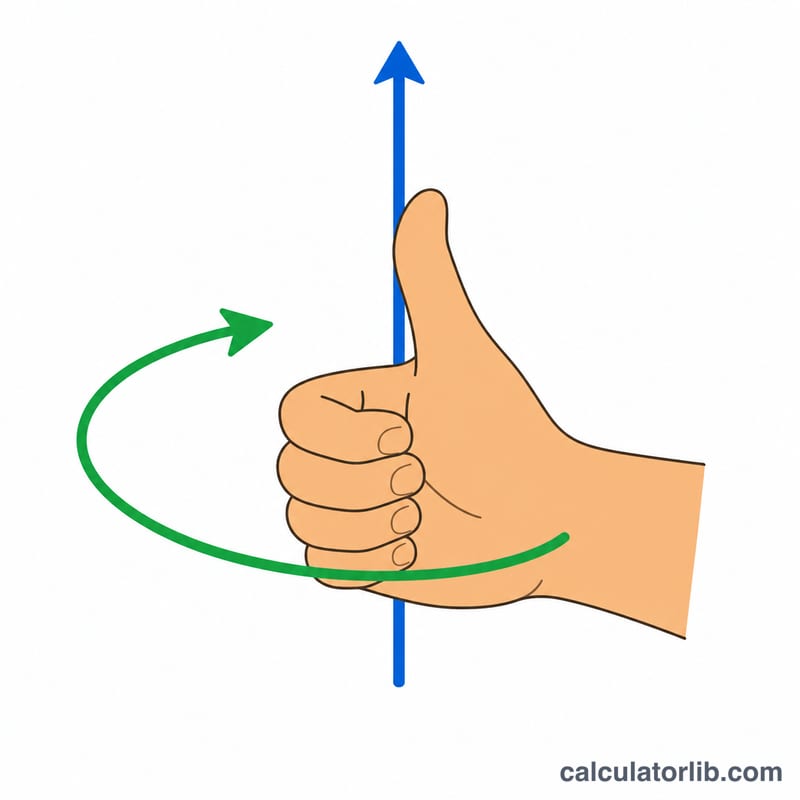
- قاعدة اليد اليمنى
- طريقة تذكر لاتجاه الدوران الموجب: أشر بإبهام اليد اليمنى على طول محور الدوران الموجب، والتفاف الأصابع يعطي اتجاه الدوران الموجب (عكس اتجاه عقارب الساعة) لذلك المحور.
- مصفوفة الدوران
- مصفوفة متعامدة \(3\times3\) بمحدد \(+1\) تدور المتجهات حول محور ثابت دون تغيير طولها. هنا \(R_X\) و \(R_Y\) و \(R_Z\) تدور حول محاور X و Y و Z على التوالي.
- \(\theta\) (ثيتا)، زاوية الدوران
- مقدار الدوران حول المحور المختار. يتم إدخاله بالدرجات أو الراديانات؛ تقوم الأداة بتحويل الدرجات داخلياً باستخدام \(\theta_{\text{rad}} = \theta_{\text{deg}}\cdot\pi/180\) قبل حساب \(\cos\theta\) و \(\sin\theta\).
- محور الدوران
- الخط الثابت (X أو Y أو Z) الذي تبقى النقاط عليه دون تغيير بينما يدور كل شيء آخر حوله. في هذه الأداة يتم اختيار محور كل خطوة على أنه 0 = X أو 1 = Y أو 2 = Z.
- الاتجاه الموجب / عكس اتجاه عقارب الساعة
- الزاوية الموجبة تنتج دوراناً عكس اتجاه عقارب الساعة عند النظر من الطرف الموجب للمحور باتجاه نقطة الأصل. الزاوية السالبة تعكسه (باتجاه عقارب الساعة).
- إحداثيات المخرجات \(x'\) و \(y'\) و \(z'\)
- مكونات النقطة المدارة \(\mathbf{p}' = R\,\mathbf{p}\). مع دوران متسلسل واحد أو أكثر، \(\mathbf{p}' = R_{a_3}(\theta_3)\,R_{a_2}(\theta_2)\,R_{a_1}(\theta_1)\,\mathbf{p}\)، حيث يتم تطبيق المصفوفة الأكثر اليميناً أولاً.
الأسئلة الشائعة
ما هو اتجاه الدوران الموجب؟ الموجب يعني عكس عقارب الساعة عند النظر من الطرف الموجب للمحور باتجاه نقطة الأصل (قاعدة اليد اليمنى).
هل يهم ترتيب الدورات؟ نعم. الدورات ثلاثية الأبعاد لا تخضع لخاصية الإبدال، لذا فإن الدوران حول X ثم Z يختلف عمومًا عن الدوران حول Z ثم X. وهذه الأداة تطبّق الخطوة 1 أولًا.
لماذا تظهر بعض النتائج كـ 0 بدلًا من رقم صغير جدًا؟ قيم مثل \(\cos(90°)\) ليست صفرًا تمامًا في الحساب العائم (floating point)، لذا تُهذَّب المخرجات شبه الصفرية إلى 0 لمزيد من الوضوح.