Công cụ này dùng để làm gì
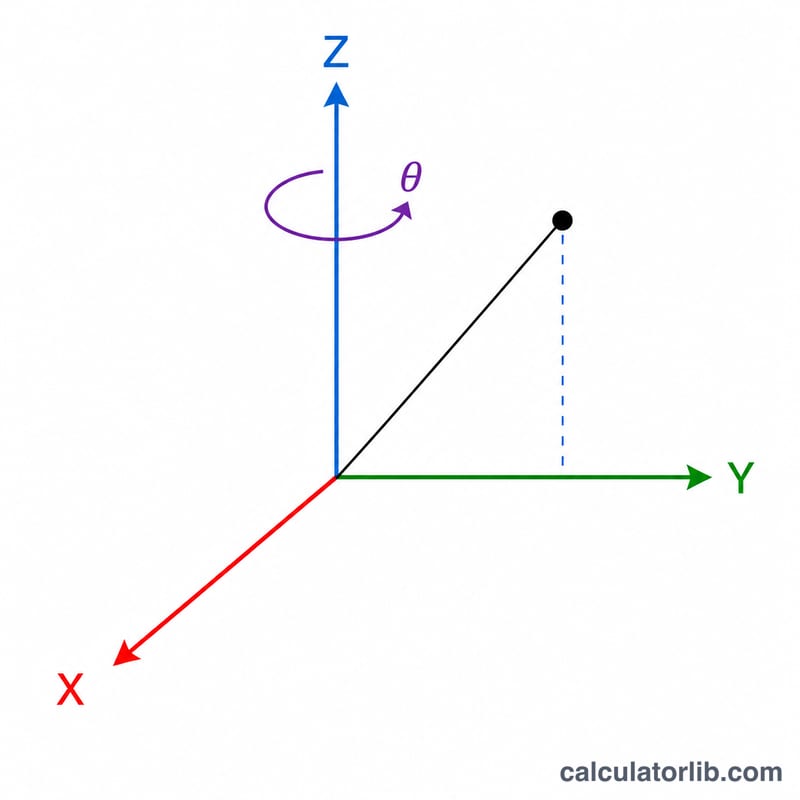
Máy Tính Xoay Tọa Độ 3D giúp bạn xác định vị trí mới của một điểm trong không gian ba chiều sau khi xoay điểm đó quanh trục X, Y và/hoặc Z. Công cụ sử dụng hệ tọa độ thuận tay phải cùng quy ước dấu theo quy tắc bàn tay phải, nên một góc dương sẽ xoay điểm ngược chiều kim đồng hồ khi bạn nhìn từ đầu dương của trục xoay hướng về gốc tọa độ. Đây hoàn toàn là hình học giải tích và áp dụng được cho mọi lĩnh vực — từ vật lý, robot, đồ họa máy tính, CAD cho đến kỹ thuật.
Cách sử dụng
Nhập tọa độ ban đầu (x, y, z ban đầu) của điểm cần xoay. Chọn xem góc của bạn được tính bằng độ hay radian. Sau đó thiết lập tối đa ba bước xoay, mỗi bước gồm một trục và một góc. Các bước được áp dụng tuần tự: Bước 1 tác động lên điểm gốc, Bước 2 tác động lên kết quả của Bước 1, cứ thế tiếp tục. Để trống ô góc hoặc đặt bằng 0 nếu muốn bỏ qua bước đó. Nếu chỉ cần xoay một lần, bạn chỉ việc điền Bước 1.
Giải thích công thức
Phép xoay quanh trục Z được biểu diễn bằng ma trận xoay sau:
$$R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$$Với mỗi bước, gọi theta là góc tính bằng radian, đặt \(c = \cos\theta\) và \(s = \sin\theta\). Phép xoay quanh trục Z giữ nguyên \(z\) và biến \((x, y)\) thành \((x\cdot c - y\cdot s,\; x\cdot s + y\cdot c)\). Phép xoay quanh trục X giữ nguyên \(x\); phép xoay quanh trục Y giữ nguyên \(y\), mỗi phép đều trộn hai tọa độ còn lại theo cùng một cách. Kết hợp nhiều phép xoay tương đương với việc nhân các ma trận xoay của chúng, nhưng áp dụng từng bước lên vectơ sẽ giúp tránh nhầm lẫn về thứ tự.
$$\begin{aligned} x^{\prime} &= x \\ y^{\prime} &= y\cos\theta - z\sin\theta \\ z^{\prime} &= y\sin\theta + z\cos\theta \end{aligned}$$$$\begin{aligned} x^{\prime} &= x\cos\theta + z\sin\theta,\; y^{\prime}=y,\; z^{\prime}=-x\sin\theta + z\cos\theta \\ x^{\prime} &= x\cos\theta - y\sin\theta,\; y^{\prime}=x\sin\theta + y\cos\theta,\; z^{\prime}=z \end{aligned}$$
Ví dụ minh họa
Lấy điểm \((1, 0, 1)\) và xoay nó \(90°\) quanh trục Z. Khi đó \(\theta = \pi/2\), nên \(c = 0\) và \(s = 1\). Ta có \(x' = 1\cdot 0 - 0\cdot 1 = 0\), \(y' = 1\cdot 1 + 0\cdot 0 = 1\), còn \(z'\) giữ nguyên bằng \(1\). Kết quả là \((0, 1, 1)\).
Các Giá Trị Góc Quay Thường Dùng
Các phần tử của mỗi ma trận quay chỉ phụ thuộc vào \(\cos\theta\) và \(\sin\theta\). Bảng liệt kê các giá trị chính xác cho các góc phổ biến nhất để bạn có thể thay thế trực tiếp vào \(R_X\), \(R_Y\) hoặc \(R_Z\). Các xấp xỉ thập phân được hiển thị đến bốn chữ số thập phân.
| \(\theta\) (độ) | \(\theta\) (rad) | \(\cos\theta\) | \(\sin\theta\) |
|---|---|---|---|
| 0° | 0 | 1 | 0 |
| 30° | \(\pi/6\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) | \(\tfrac12=0.5\) |
| 45° | \(\pi/4\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) |
| 60° | \(\pi/3\) | \(\tfrac12=0.5\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) |
| 90° | \(\pi/2\) | 0 | 1 |
| 180° | \(\pi\) | −1 | 0 |
| 270° | \(3\pi/2\) | 0 | −1 |
Lưu ý rằng một phép quay \(180^\circ\) đảo dấu của hai tọa độ vuông góc với trục, trong khi \(270^\circ\) tương đương với \(-90^\circ\) (một quay một phần tư theo chiều kim đồng hồ khi nhìn xuống trục dương).
Các Thuật Ngữ & Biến Chính
- Hệ tọa độ thuận tay phải
- Một khung 3D trong đó các trục X, Y và Z được định hướng sao cho khi hướng các ngón tay của tay phải từ +X đến +Y, ngón cái sẽ chỉ dọc theo +Z. Quy ước tiêu chuẩn trong toán học và vật lý; các ma trận quay này giả định điều đó.
- Quy tắc tay phải
- Một cách nhớ chiều quay dương: chỉ ngón cái tay phải dọc theo trục quay dương, và sự cong của các ngón tay cho chiều dương (ngược chiều kim đồng hồ) của phép quay cho trục đó.
- Ma trận quay
- Một ma trận trực giao \(3\times3\) với định thức \(+1\) quay vectơ quanh một trục cố định mà không thay đổi độ dài của chúng. Ở đây \(R_X\), \(R_Y\) và \(R_Z\) quay quanh các trục X, Y và Z tương ứng.
- \(\theta\) (theta), góc quay
- Lượng quay quanh trục đã chọn. Nhập bằng độ hoặc radian; công cụ chuyển đổi độ nội bộ với \(\theta_{\text{rad}} = \theta_{\text{deg}}\cdot\pi/180\) trước khi tính toán \(\cos\theta\) và \(\sin\theta\).
- Trục quay
- Đường cố định (X, Y hoặc Z) mà các điểm nằm trên nó không thay đổi trong khi mọi thứ khác xoay quanh nó. Trong công cụ này, trục của mỗi bước được chọn là 0 = X, 1 = Y, 2 = Z.
- Chiều dương / ngược chiều kim đồng hồ
- Một góc dương tạo ra phép quay ngược chiều kim đồng hồ khi nhìn từ đầu dương của trục quay lại về gốc tọa độ. Một góc âm đảo ngược nó (theo chiều kim đồng hồ).
- Tọa độ đầu ra \(x'\), \(y'\), \(z'\)
- Các thành phần của điểm đã quay \(\mathbf{p}' = R\,\mathbf{p}\). Với một hoặc nhiều phép quay tuần tự, \(\mathbf{p}' = R_{a_3}(\theta_3)\,R_{a_2}(\theta_2)\,R_{a_1}(\theta_1)\,\mathbf{p}\), trong đó ma trận bên phải được áp dụng trước.
Câu hỏi thường gặp
Chiều xoay dương là chiều nào? Dương nghĩa là ngược chiều kim đồng hồ khi nhìn từ đầu dương của trục hướng về gốc tọa độ (quy tắc bàn tay phải).
Thứ tự các phép xoay có quan trọng không? Có. Các phép xoay 3D không có tính giao hoán, nên xoay quanh X rồi Z thường khác với xoay Z rồi X. Công cụ này luôn áp dụng Bước 1 trước.
Vì sao một số kết quả hiển thị 0 thay vì một số rất nhỏ? Các giá trị như \(\cos(90°)\) không bằng đúng 0 trong tính toán dấu phẩy động, nên những kết quả gần bằng 0 được làm tròn về 0 cho dễ đọc.