Bu hesaplayıcı ne işe yarar?
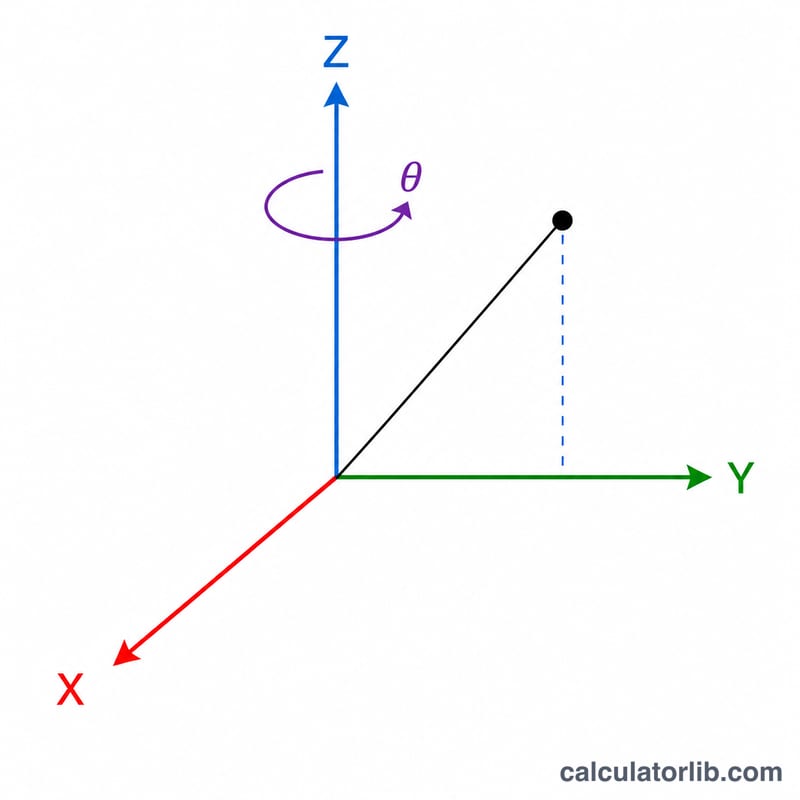
3B Koordinat Döndürme Hesaplayıcı, bir noktayı X, Y ve/veya Z ekseni etrafında döndürdüğünüzde üç boyutlu uzaydaki yeni konumunu bulur. Sağ elli koordinat sistemi ve sağ el kuralı işaret kuralını kullanır; yani pozitif bir açı, dönüş ekseninin pozitif ucundan başlangıç noktasına doğru baktığınızda noktayı saat yönünün tersine döndürür. Bu, tamamen analitik geometri olduğu için fizik, robotik, bilgisayar grafikleri, CAD ve mühendislik gibi her alanda evrensel olarak geçerlidir.
Nasıl kullanılır?
Noktanızın başlangıç koordinatlarını (Başlangıç x, y, z) girin. Açılarınızın derece mi yoksa radyan cinsinden mi olduğunu seçin. Ardından her biri bir eksen ve bir açı içeren en fazla üç dönüş adımı tanımlayın. Adımlar sırayla uygulanır: 1. Adım orijinal noktaya, 2. Adım 1. Adımın sonucuna etki eder ve bu böyle devam eder. Bir adımı atlamak için açıyı boş bırakın veya 0 yapın. Tek bir dönüş için yalnızca 1. Adımı doldurmanız yeterlidir.
Formülün açıklaması
Her adımda theta açısı radyan cinsinden olsun ve \(c = \cos\theta\), \(s = \sin\theta\) olarak tanımlansın. Z ekseni etrafındaki dönüş z'yi sabit tutar ve \((x, y)\) noktasını \((x\cdot c - y\cdot s,\ x\cdot s + y\cdot c)\) noktasına taşır. X ekseni etrafındaki dönüş x'i sabit tutar; Y ekseni etrafındaki dönüş ise y'yi sabit tutar ve her biri diğer iki koordinatı aynı şekilde karıştırır. Birden fazla dönüşü birleştirmek, döndürme matrislerini çarpmakla aynı şeydir; ancak bunları vektöre adım adım uygulamak sıralama hatalarının önüne geçer.
$$R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$$$$\begin{aligned} x^{\prime} &= x \\ y^{\prime} &= y\cos\theta - z\sin\theta \\ z^{\prime} &= y\sin\theta + z\cos\theta \end{aligned}$$$$\begin{aligned} x^{\prime} &= x\cos\theta + z\sin\theta,\; y^{\prime}=y,\; z^{\prime}=-x\sin\theta + z\cos\theta \\ x^{\prime} &= x\cos\theta - y\sin\theta,\; y^{\prime}=x\sin\theta + y\cos\theta,\; z^{\prime}=z \end{aligned}$$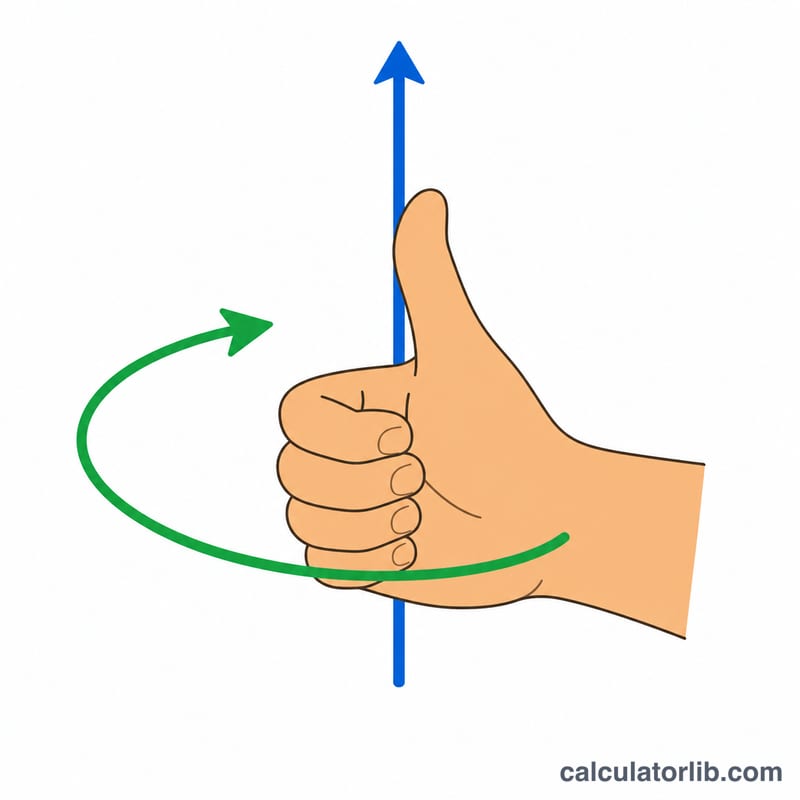
Çözümlü örnek
(1, 0, 1) noktasını alıp Z ekseni etrafında 90° döndürelim. Burada \(\theta = \pi/2\) olduğundan \(c = 0\) ve \(s = 1\) olur. O hâlde \(x' = 1\cdot 0 - 0\cdot 1 = 0\), \(y' = 1\cdot 1 + 0\cdot 0 = 1\) olur; \(z'\) ise 1 olarak değişmez kalır. Sonuç (0, 1, 1) çıkar.
Yaygın Döndürme Açı Değerleri
Her döndürme matrisinin girişleri yalnızca \(\cos\theta\) ve \(\sin\theta\)'ye bağlıdır. Tablo, en yaygın açılar için tam değerleri listeler, böylece bunları doğrudan \(R_X\), \(R_Y\) veya \(R_Z\) içine yerleştirebilirsiniz. Ondalık yaklaşımlar dört basamağa gösterilmiştir.
| \(\theta\) (der) | \(\theta\) (rad) | \(\cos\theta\) | \(\sin\theta\) |
|---|---|---|---|
| 0° | 0 | 1 | 0 |
| 30° | \(\pi/6\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) | \(\tfrac12=0.5\) |
| 45° | \(\pi/4\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) |
| 60° | \(\pi/3\) | \(\tfrac12=0.5\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) |
| 90° | \(\pi/2\) | 0 | 1 |
| 180° | \(\pi\) | −1 | 0 |
| 270° | \(3\pi/2\) | 0 | −1 |
\(180^\circ\) döndürmenin eksenin perpendikülüne olan iki koordinatın işaretini değiştirirken, \(270^\circ\) işleminin \(-90^\circ\)'ye eşdeğer olduğunu (pozitif eksen aşağı bakıldığında saat yönünde bir çeyrek dönüş) unutmayın.
Temel Terimler ve Değişkenler
- Sağ-elimli koordinat sistemi
- Sağ elin parmaklarını +X'ten +Y'ye doğru işaret ettirdiğinde başparmağın +Z boyunca işaret etmesi şeklinde X, Y ve Z eksenlerinin yönlendirildiği 3B bir çerçeve. Standart matematik ve fizik kuralı; bu döndürme matrisleri bunu varsayar.
- Sağ-el kuralı
- Pozitif döndürme yönü için bir anımsatıcı: sağ başparmağı döndürme ekseninin pozitif yönü boyunca işaret edin, parmakların kıvrılması o eksen için döndürmenin pozitif (saat yönünün tersine) yönünü verir.
- Döndürme matrisi
- Vektörleri uzunluğunu değiştirmeden sabit bir eksen etrafında döndüren determinantı \(+1\) olan \(3\times3\) ortogonal matris. Burada \(R_X\), \(R_Y\) ve \(R_Z\) sırasıyla X, Y ve Z eksenleri etrafında döndürür.
- \(\theta\) (teta), döndürme açısı
- Seçilen eksen etrafındaki döndürme miktarı. Derece veya radyan cinsinden girilir; araç \(\theta_{\text{rad}} = \theta_{\text{deg}}\cdot\pi/180\) ile derecelerle derece cinsinden dönüştürür ve \(\cos\theta\) ve \(\sin\theta\)'yı değerlendirmeden önce.
- Döndürme ekseni
- Üzerindeki noktaların değişmez kaldığı sabit çizgi (X, Y veya Z), diğer her şey onun etrafında döner. Bu araçta her adımın ekseni 0 = X, 1 = Y, 2 = Z olarak seçilir.
- Pozitif / saat yönünün tersine yön
- Pozitif bir açı, eksenin pozitif ucundan orijine doğru bakıldığında saat yönünün tersine döndürme üretir. Negatif bir açı bunu tersine çevirir (saat yönü).
- Çıktı koordinatları \(x'\), \(y'\), \(z'\)
- Döndürülmüş nokta \(\mathbf{p}' = R\,\mathbf{p}\)'nin bileşenleri. Bir veya daha fazla ardışık döndürme ile, \(\mathbf{p}' = R_{a_3}(\theta_3)\,R_{a_2}(\theta_2)\,R_{a_1}(\theta_1)\,\mathbf{p}\), burada en sağdaki matris ilk olarak uygulanır.
Sıkça sorulan sorular
Pozitif dönüş yönü nedir? Pozitif yön, pozitif eksenden başlangıç noktasına doğru bakıldığında saat yönünün tersi anlamına gelir (sağ el kuralı).
Dönüşlerin sırası önemli mi? Evet. 3B dönüşler değişmeli değildir; bu yüzden önce X sonra Z etrafında döndürmek, genellikle önce Z sonra X etrafında döndürmekten farklı sonuç verir. Bu araç önce 1. Adımı uygular.
Neden bazı sonuçlar çok küçük bir sayı yerine 0 gösteriyor? \(\cos(90°)\) gibi değerler kayan nokta aritmetiğinde tam olarak 0 değildir; bu nedenle sıfıra çok yakın çıktılar netlik için 0'a yuvarlanır.