이 계산기의 기능
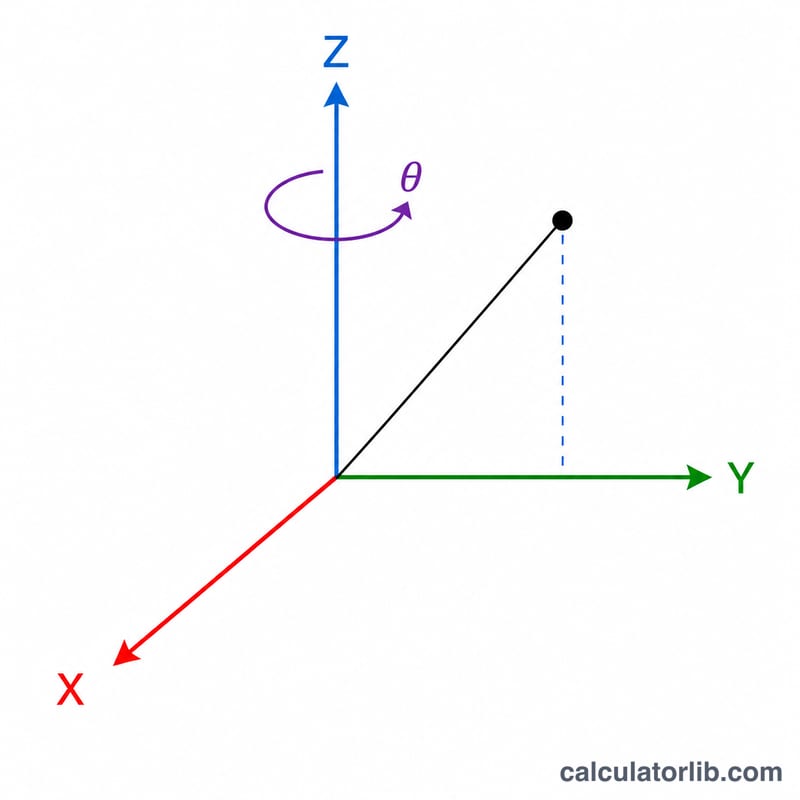
3D 좌표 회전 계산기는 3차원 공간의 한 점을 X, Y, Z축 중 하나 또는 여러 축을 기준으로 회전했을 때 새로운 위치를 구해 줍니다. 오른손 좌표계와 오른손 법칙 부호 규약을 사용하므로, 회전축의 양(+)의 끝에서 원점을 바라볼 때 양의 각도는 점을 반시계 방향으로 회전시킵니다. 이는 순수한 해석기하학이라 물리학, 로보틱스, 컴퓨터 그래픽스, CAD, 공학 등 어디에나 동일하게 적용됩니다.
사용 방법
먼저 점의 시작 좌표(초기 x, y, z)를 입력하세요. 각도 단위를 도(°)로 할지 라디안으로 할지 선택합니다. 그런 다음 각각 축과 각도를 지정해 최대 3단계의 회전을 설정합니다. 단계는 순서대로 적용됩니다. 1단계는 원래 점에, 2단계는 1단계의 결과에 작용하는 식입니다. 특정 단계를 건너뛰려면 각도를 비워 두거나 0으로 설정하세요. 한 번만 회전한다면 1단계만 입력하면 됩니다.
공식 설명
각 단계에서 \(\theta\)를 라디안 단위의 각도라 하고 \(c = \cos\theta\), \(s = \sin\theta\)로 둡니다. Z축 회전은 \(z\)를 고정한 채 \((x, y)\)를 \((x\cdot c - y\cdot s,\; x\cdot s + y\cdot c)\)로 변환합니다.
$$R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$$X축 회전은 \(x\)를 고정하고, Y축 회전은 \(y\)를 고정하며, 나머지 두 좌표를 같은 방식으로 섞어 줍니다.
$$\begin{aligned} x^{\prime} &= x \\ y^{\prime} &= y\cos\theta - z\sin\theta \\ z^{\prime} &= y\sin\theta + z\cos\theta \end{aligned}$$$$\begin{aligned} x^{\prime} &= x\cos\theta + z\sin\theta,\; y^{\prime}=y,\; z^{\prime}=-x\sin\theta + z\cos\theta \\ x^{\prime} &= x\cos\theta - y\sin\theta,\; y^{\prime}=x\sin\theta + y\cos\theta,\; z^{\prime}=z \end{aligned}$$여러 회전을 합성하는 것은 각 회전 행렬을 곱하는 것과 같지만, 벡터에 한 단계씩 차례로 적용하면 순서 실수를 피할 수 있습니다.
계산 예시
점 \((1, 0, 1)\)을 Z축 기준으로 90° 회전시켜 봅시다. 여기서 \(\theta = \pi/2\)이므로 \(c = 0\), \(s = 1\)입니다. 그러면 $$x' = 1\cdot 0 - 0\cdot 1 = 0, \quad y' = 1\cdot 1 + 0\cdot 0 = 1$$이 되고 \(z'\)은 1로 그대로 유지됩니다. 결과는 \((0, 1, 1)\)입니다.
일반적인 회전 각도 값
모든 회전 행렬의 항목은 \(\cos\theta\)와 \(\sin\theta\)에만 의존합니다. 표는 가장 흔한 각도의 정확한 값을 나열하므로 \(R_X\), \(R_Y\) 또는 \(R_Z\)에 직접 대입할 수 있습니다. 10진수 근삿값은 소수점 이하 4자리로 표시됩니다.
| \(\theta\) (도) | \(\theta\) (라디안) | \(\cos\theta\) | \(\sin\theta\) |
|---|---|---|---|
| 0° | 0 | 1 | 0 |
| 30° | \(\pi/6\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) | \(\tfrac12=0.5\) |
| 45° | \(\pi/4\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) |
| 60° | \(\pi/3\) | \(\tfrac12=0.5\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) |
| 90° | \(\pi/2\) | 0 | 1 |
| 180° | \(\pi\) | −1 | 0 |
| 270° | \(3\pi/2\) | 0 | −1 |
\(180^\circ\) 회전은 축에 수직인 두 좌표의 부호를 바꾸고, \(270^\circ\)는 \(-90^\circ\)와 같습니다(양의 축을 따라 내려다볼 때 시계 방향으로 1/4 회전).
주요 용어 및 변수
- 우향(右向) 좌표계
- \(X\), \(Y\), \(Z\) 축이 배향되어 오른손의 손가락을 \(+X\)에서 \(+Y\)로 향하게 하면 엄지손가락이 \(+Z\)를 따라 가리키는 3차원 좌표계입니다. 표준 수학 및 물리학 규약이며, 이 회전 행렬들은 이를 가정합니다.
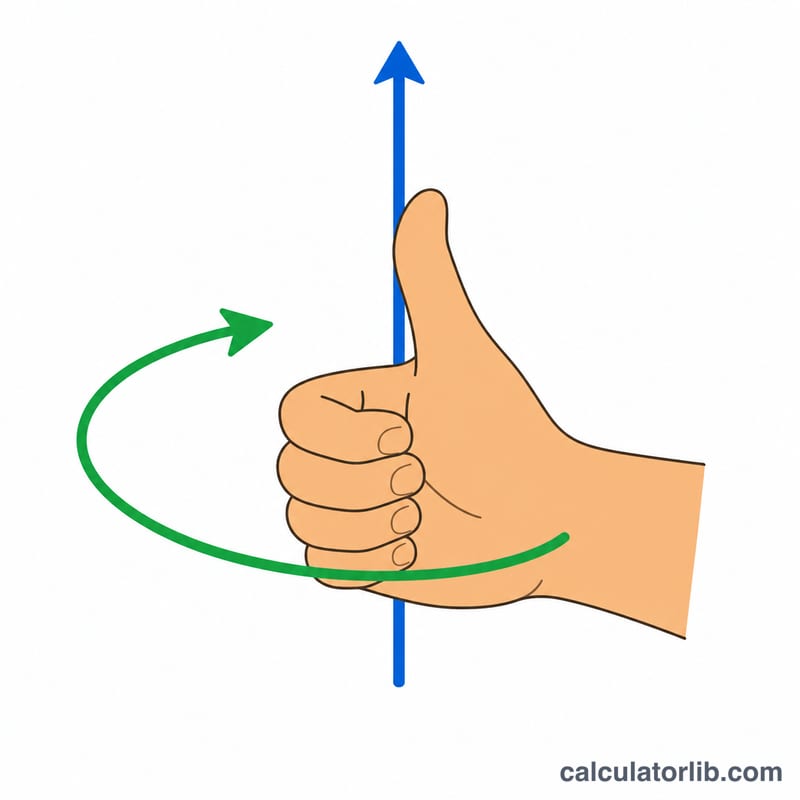
- 우향 법칙
- 회전의 양의 방향을 기억하기 위한 규칙입니다: 오른손 엄지손가락을 회전축의 양의 방향을 따라 가리키면, 손가락의 말림이 그 축에 대한 양의(반시계 방향) 회전 방향을 나타냅니다.
- 회전 행렬
- 행렬식이 \(+1\)인 \(3\times3\) 직교 행렬로, 벡터의 길이를 변하지 않게 하면서 고정축 주위로 벡터를 회전시킵니다. 여기서 \(R_X\), \(R_Y\), \(R_Z\)는 각각 \(X\), \(Y\), \(Z\) 축 주위로 회전시킵니다.
- \(\theta\) (세타), 회전 각도
- 선택된 축에 대한 회전량입니다. 도 또는 라디안 단위로 입력되며, 도구는 \(\cos\theta\)와 \(\sin\theta\)를 계산하기 전에 \(\theta_{\text{rad}} = \theta_{\text{deg}}\cdot\pi/180\)을 사용하여 도를 라디안으로 변환합니다.
- 회전축
- 그 위의 점들은 변하지 않고 다른 모든 것이 그 주위로 회전하는 고정된 직선(\(X\), \(Y\) 또는 \(Z\))입니다. 이 도구에서 각 단계의 축은 0 = \(X\), 1 = \(Y\), 2 = \(Z\)로 선택됩니다.
- 양의/반시계 방향
- 양의 각도는 축의 양의 끝에서 원점을 향해 볼 때 반시계 방향 회전을 만듭니다. 음의 각도는 이를 역으로 하여 시계 방향 회전을 만듭니다.
- 출력 좌표 \(x'\), \(y'\), \(z'\)
- 회전된 점 \(\mathbf{p}' = R\,\mathbf{p}\)의 성분입니다. 하나 이상의 순차 회전이 있을 경우, \(\mathbf{p}' = R_{a_3}(\theta_3)\,R_{a_2}(\theta_2)\,R_{a_1}(\theta_1)\,\mathbf{p}\)이며, 가장 오른쪽 행렬이 먼저 적용됩니다.
자주 묻는 질문
양의 회전 방향이란 무엇인가요? 양의 방향은 양의 축에서 원점을 바라볼 때 반시계 방향을 뜻합니다(오른손 법칙).
회전 순서가 중요한가요? 네, 중요합니다. 3D 회전은 교환법칙이 성립하지 않으므로, X 다음에 Z를 회전하는 것과 Z 다음에 X를 회전하는 것은 일반적으로 결과가 다릅니다. 이 도구는 1단계를 가장 먼저 적용합니다.
왜 어떤 결과는 아주 작은 수 대신 0으로 표시되나요? \(\cos(90°)\) 같은 값은 부동소수점 연산에서 정확히 0이 아닙니다. 그래서 0에 매우 가까운 출력은 가독성을 위해 0으로 정리해 표시합니다.