이 계산기의 기능
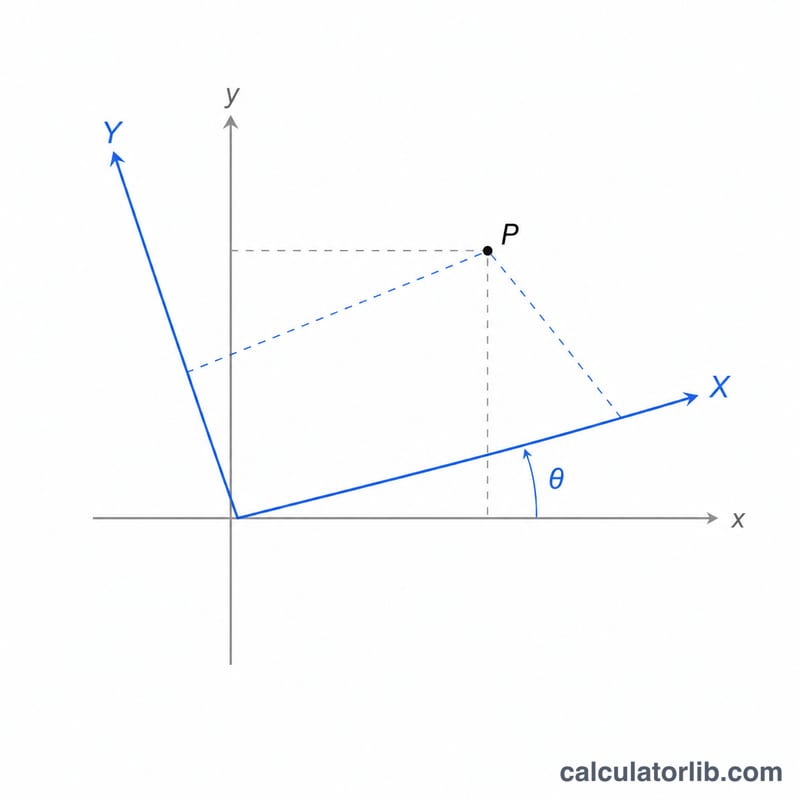
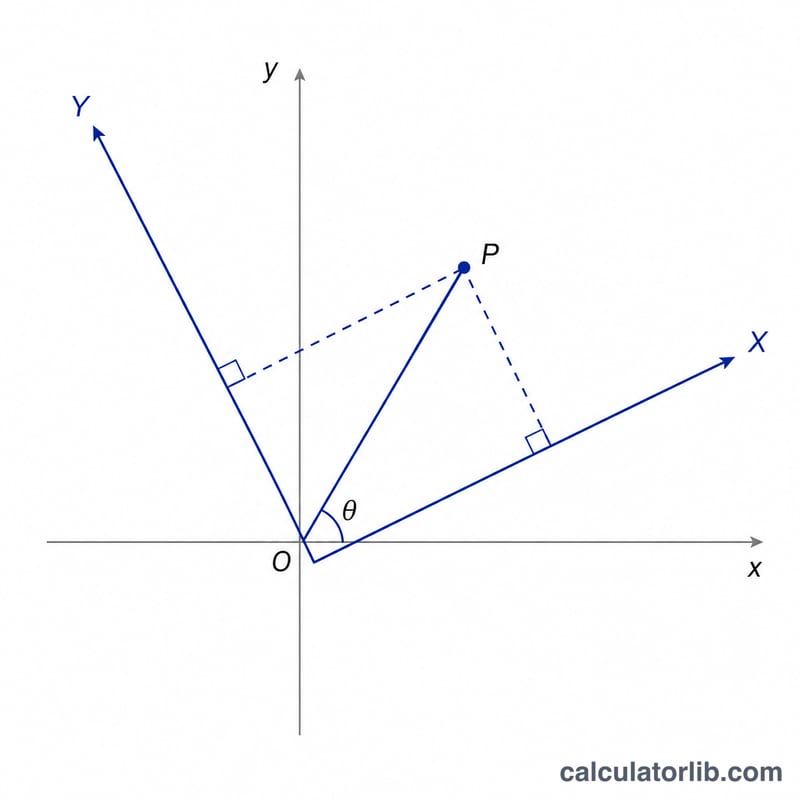
이 도구는 평면 해석기하학에서 다루는 전형적인 좌표축 회전(rotation of axes) 변환을 수행합니다. 원래 좌표축에서 측정한 점의 좌표 \((x, y)\)와, 원점을 중심으로 좌표축을 반시계 방향으로 회전시키는 각도 \(\theta\)를 입력하면, 동일한 고정점이 회전된 새 좌표축에서 가지는 좌표 \((X, Y)\)를 계산해 줍니다. 이는 점은 그대로 두고 축만 돌리는 수동적(passive) 변환입니다.
사용 방법
원래의 \(x\)값과 \(y\)값을 입력하고, 회전각 \(\theta\)를 적은 뒤, \(\theta\)의 단위를 도(degree)로 할지 라디안으로 할지 선택하세요. 양수 각도는 좌표축을 반시계 방향으로 회전시키고, 시계 방향으로 회전하려면 음수를 입력하면 됩니다. 계산 버튼을 누르면 새 좌표 \(X\)와 \(Y\), 그리고 라디안으로 환산한 각도가 함께 표시됩니다.
공식 설명
변환식은 다음과 같습니다.
$$\begin{aligned} X &= x\cos\theta + y\sin\theta \\ Y &= -x\sin\theta + y\cos\theta \end{aligned}$$행렬로 나타내면 대각 성분이 \(\cos\theta\)이고 비대각 성분이 \(\sin\theta\), \(-\sin\theta\)인 회전행렬이 됩니다. 이 행렬은 직교행렬이므로 원점으로부터의 거리가 보존됩니다. 즉 \(X^2 + Y^2\)는 항상 \(x^2 + y^2\)와 같으며, 이는 결과를 검산하는 데 유용한 방법입니다.
계산 예시
\(x = 3\), \(y = 4\), \(\theta = 30\)도라고 합시다. 이때 \(\cos 30 = 0.8660254\), \(\sin 30 = 0.5\) 이므로
$$X = 3(0.8660254) + 4(0.5) = 4.59807621$$$$Y = -3(0.5) + 4(0.8660254) = 1.96410162$$검산해 보면 \(4.59807621^2 + 1.96410162^2 = 25 = 3^2 + 4^2\) 이 되어 거리가 보존됨을 확인할 수 있습니다.
자주 묻는 질문(FAQ)
좌표축을 회전하는 것과 점을 회전하는 것은 어떻게 다른가요? 좌표축을 회전하는 것(이 도구)은 수동적(passive) 변환입니다. 반면 점 자체를 회전하는 것은 능동적(active) 변환으로, 부호 규약이 전치된 형태인 \(X = x\cos\theta - y\sin\theta\), \(Y = x\sin\theta + y\cos\theta\) 를 사용합니다.
360도보다 큰 각도를 입력해도 되나요? 네, 됩니다. 삼각함수는 주기성을 가지므로 어떤 실수 각도라도 자연스럽게 처리됩니다. 0도에서 360도 범위를 벗어난 값도 같은 결과를 줍니다.
왜 원점으로부터의 거리가 변하지 않나요? 회전은 등거리변환(isometry)이기 때문입니다. 길이와 각도를 그대로 보존하므로, 점에서 원점까지의 거리는 두 좌표계 모두에서 동일합니다.