この計算機でできること
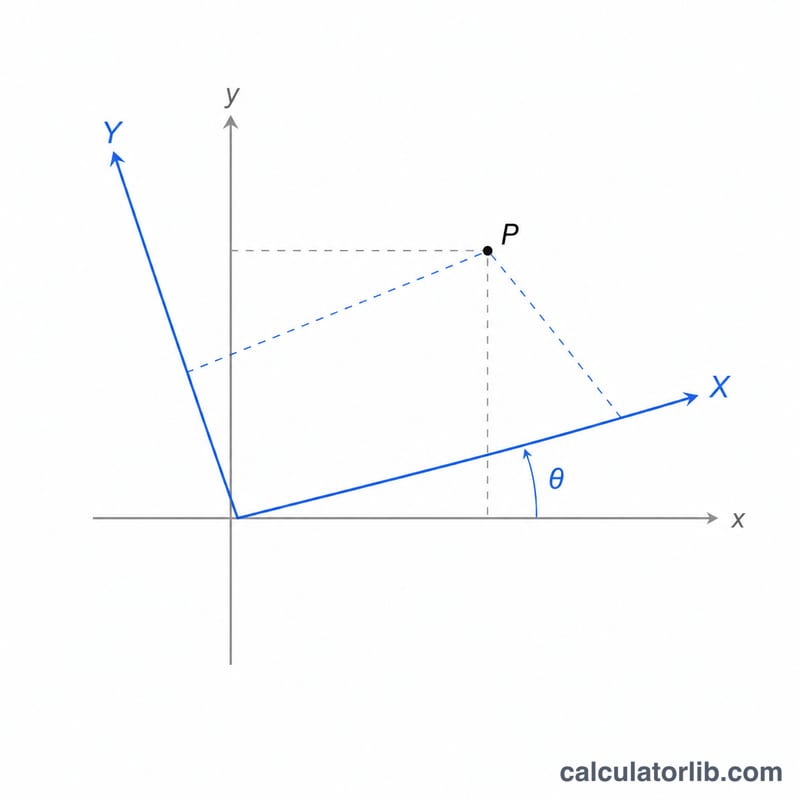
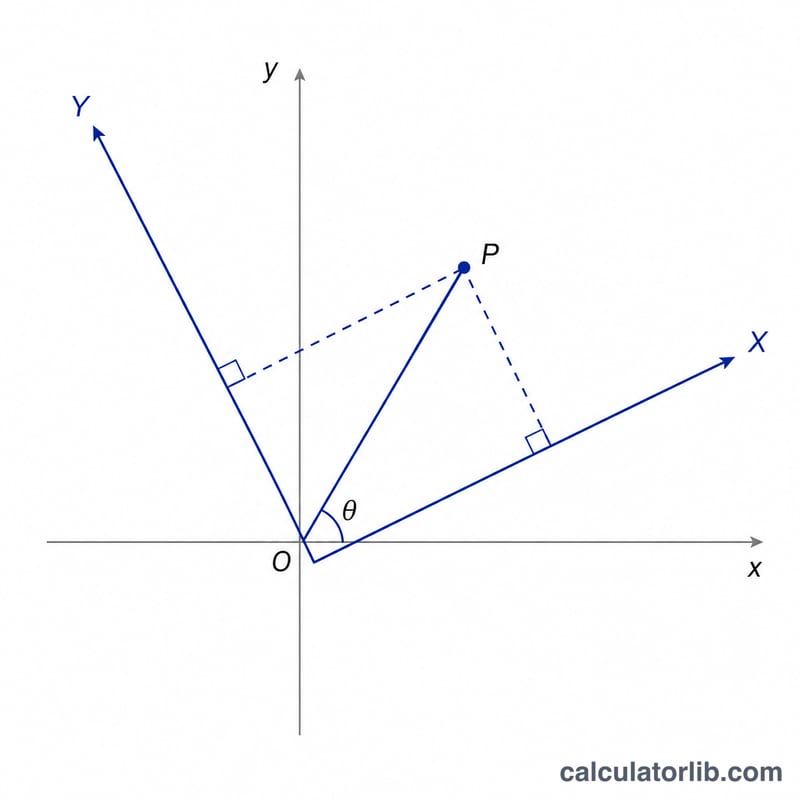
この計算機は、平面解析幾何でおなじみの座標軸の回転変換を行います。元の座標軸で測った点の座標 \((x, y)\) と、原点を中心に座標軸を反時計回りに回転させる角度 \(\theta\) を入力すると、同じ位置にある点を回転後の新しい座標軸から見たときының座標 (X, Y) を求めます。これは点そのものは動かさず、座標軸だけを回転させる「受動的変換(passive transformation)」です。
使い方
まず元の座標 \(x\) と \(y\) を入力し、続いて回転角 \(\theta\) を入力します。\(\theta\) の単位は「度」または「ラジアン」から選べます。角度を正にすると座標軸は反時計回りに回転し、負の値を入れると時計回りに回転します。「計算」を押すと、新しい座標 \(X\) と \(Y\)、さらに角度をラジアンで表した値が表示されます。
計算式の解説
変換式は $$\begin{aligned} X &= x\cos\theta + y\sin\theta \\ Y &= -x\sin\theta + y\cos\theta \end{aligned}$$ です。行列で表すと、対角成分に \(\cos\theta\)、非対角成分に \(\sin\theta\) と \(-\sin\theta\) を並べた回転行列になります。これは直交行列なので原点からの距離が保たれ、\(X^2 + Y^2\) は必ず \(x^2 + y^2\) と等しくなります。検算(チェック)に便利な性質です。
計算例
\(x = 3\)、\(y = 4\)、\(\theta = 30\) 度 とします。このとき \(\cos 30° = 0.8660254\)、\(\sin 30° = 0.5\) です。よって $$X = 3 \times 0.8660254 + 4 \times 0.5 = 4.59807621$$ $$Y = -3 \times 0.5 + 4 \times 0.8660254 = 1.96410162$$ となります。検算すると $$4.59807621^2 + 1.96410162^2 = 25 = 3^2 + 4^2$$ となり、原点からの距離が保たれていることが確認できます。
よくある質問
座標軸を回転させるのと、点を回転させるのは何が違いますか? 座標軸を回転させる(このツール)のは受動的変換です。一方、点そのものを回転させるのは能動的変換(active transformation)で、符号が転置された規約を用います。すなわち \(X = x\cos\theta - y\sin\theta\)、\(Y = x\sin\theta + y\cos\theta\) となります。
360度を超える角度を入力できますか? はい、入力できます。三角関数は周期的なので任意の実数の角度に対応し、0〜360度の範囲外の値でも同等の結果が得られます。
なぜ原点からの距離は変わらないのですか? 回転は等長変換(アイソメトリ)であり、長さと角度を保ちます。そのため、原点から点までの距離はどちらの座標系でも同じになります。