この変換ツールでできること
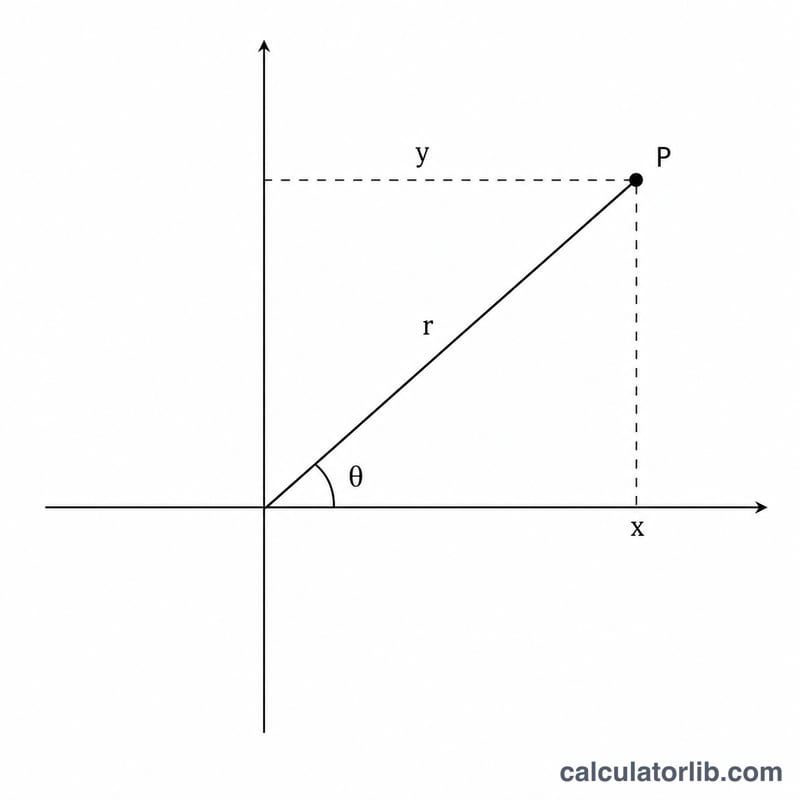
このツールは、2次元の直交座標(直角座標)(x, y)で与えられた点を、極座標(r, θ)に変換します。動径rは原点から点までの直線距離を表し、偏角θはx軸の正の向きから反時計回りに測った角度です。θは度数法(度)と弧度法(ラジアン)のどちらでも表示できます。
使い方
X座標とY座標を入力し、出力する角度を「度」と「ラジアン」のどちらにするかを選ぶだけで、rとθがすぐに求められます。座標は単位を持たない平面上の値なので、rはxとyに用いた長さの単位と同じ単位で表されます。
計算式の解説
動径rは三平方の定理(ピタゴラスの定理)から求めます。\(r = \sqrt{x^{2} + y^{2}}\) です。偏角は2引数の逆正接関数を使い、\(\theta = \operatorname{atan2}(y,\ x)\) で計算します。多くの教科書では \(\theta = \arctan(y/x)\) と書かれていますが、通常のarctanは −90°〜90°の範囲しか返さず、x = 0 のときは定義できません。atan2関数はこの2つの問題を解決します。xとyの符号を判定して角度を正しい象限に配置し、(−180°, 180°](弧度法では (−π, π])の範囲の値を返します。
計算例
x = 3、y = 4 のとき:$$r = \sqrt{9 + 16} = \sqrt{25} = 5$$角度は \(\operatorname{atan2}(4, 3) = 0.927295\ \text{rad}\) で、これは 53.130102° に相当します。よって (3, 4) は (r = 5, θ = 53.130102°) になります。
x = −1、y = 1(第2象限)のとき:\(r = \sqrt{2} = 1.414214\)、\(\operatorname{atan2}(1, -1) = 135°\) となります。単純な \(\arctan(1 / -1)\) では誤って −45° となってしまい、atan2が不可欠であることがわかります。
よくある質問
角度はどの範囲で表されますか? このツールはatan2の規約に従い、θを (−180°, 180°] または (−π, π] の範囲で返します。0°〜360°の範囲が必要な場合は、負の結果に360°(または 2π)を加えてください。
原点ではどうなりますか? x = 0 かつ y = 0 のとき、r = 0 となり、角度は数学的には定義されません。慣例として \(\operatorname{atan2}(0, 0)\) は 0 を返すため、θは 0 と表示されます。
なぜ arctan(y/x) を使わないのですか? 通常のarctanは象限の情報を失い、x = 0 のときは0で割ることになってしまいます。atan2を使うことで、すべての象限とy軸上(垂直方向)を正しく扱えます。