このツールでできること
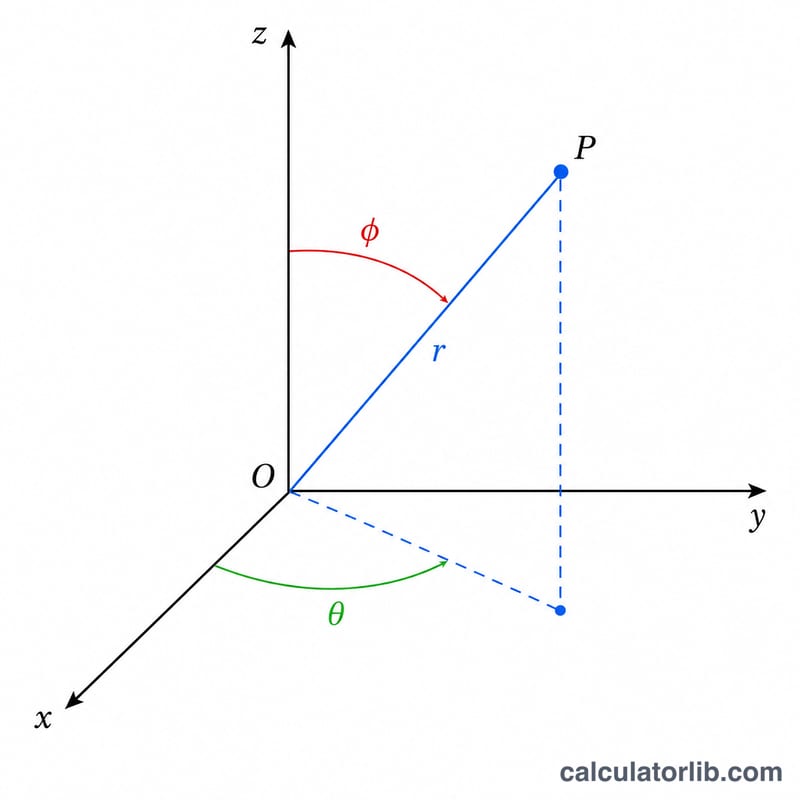
3次元の球座標で表された点を、標準的な直交座標(x, y, z)へ変換します。動径距離 \(r\)、x-y 平面内で測る方位角 \(\theta\)、正の z 軸からの傾きを表す極角 \(\phi\) を入力すると、対応する直交座標の位置が求められます。
採用している角度の定義
2つの角度の呼び方は教科書によって異なります。本計算では\(\theta\) を方位角(x-y 平面内の回転角)、\(\phi\) を極角(正の z 軸からの傾き)とする流儀を採用しています。お使いの資料で名前が逆になっている場合は、入力する値を入れ替えれば計算結果が一致します。
使い方
r・θ・φ を入力し、角度の単位を「度(初期設定)」または「ラジアン」から選んでください。本ツールは内部で角度をラジアンに換算してから(度の場合は \(\pi/180\) を掛けます)三角関数を適用し、x・y・z を約10桁の有効数字で表示します。
変換式の解説
点は半径 \(r\) の球面上にあります。極角 \(\phi\) は点が鉛直軸からどれだけ傾いているかを決め、\(z = r\cdot\cos\phi\) となります。水平面への射影の長さは \(r\cdot\sin\phi\) で、方位角 \(\theta\) がこの射影を x 軸方向と y 軸方向に振り分けるため、次のようになります。
$$x = r\,\sin\phi\,\cos\theta,\quad y = r\,\sin\phi\,\sin\theta,\quad z = r\,\cos\phi$$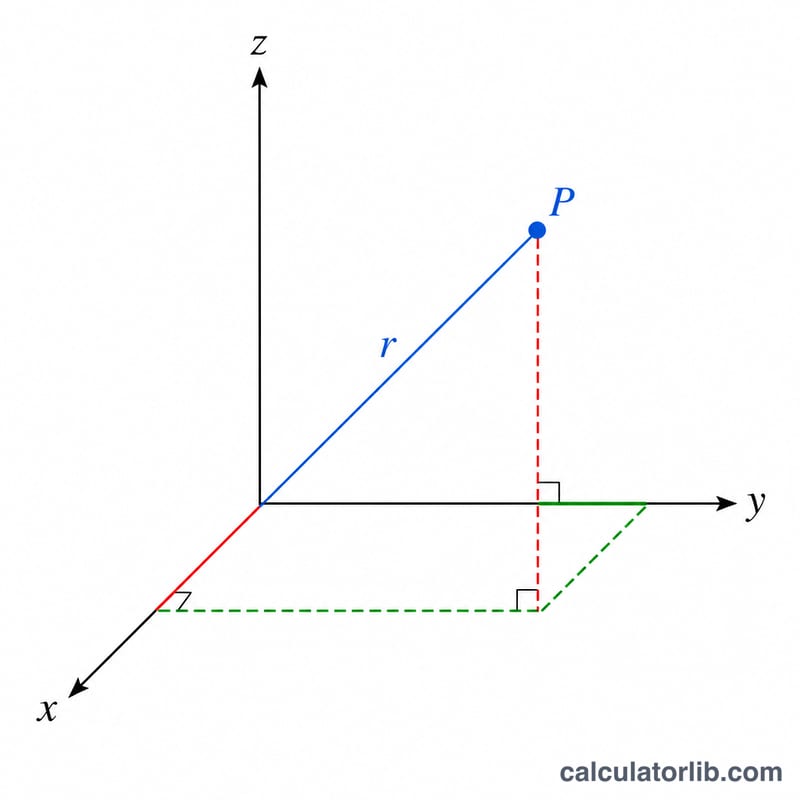
計算例
\(r = 5\)、\(\theta = 60\) 度、\(\phi = 30\) 度 とします。このとき \(\sin\phi = 0.5\)、\(\cos\phi = 0.8660254\)、\(\cos\theta = 0.5\)、\(\sin\theta = 0.8660254\) です。したがって
$$x = 5 \times 0.5 \times 0.5 = 1.25$$$$y = 5 \times 0.5 \times 0.8660254 = 2.16506351$$$$z = 5 \times 0.8660254 = 4.33012702$$となります。直交座標での点は \((1.25,\ 2.16506351,\ 4.33012702)\) です。
よくある質問
\(r = 0\) のときは? 角度の値にかかわらず、点は原点 \((0, 0, 0)\) になります。
角度に負の値や360を超える値を入れてもよい? 問題ありません。三角関数は周期的なので、どんな実数の角度でも正しく扱えます。
\(\phi = 0\) は何を意味する? 点は正の z 軸上にあり、\(x = y = 0\)、\(z = r\) となります。\(\phi = 180\) 度 なら負の z 軸上(\(z = -r\))に位置します。