What this converter does
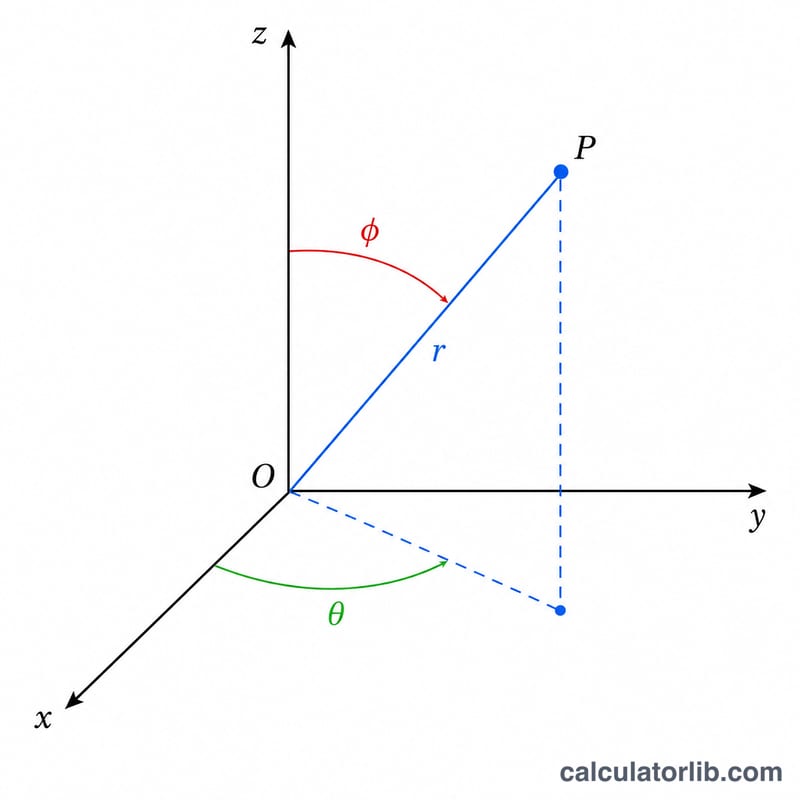
This tool converts a point described in 3D spherical coordinates into standard Cartesian coordinates (x, y, z). You supply the radial distance r, the azimuthal angle theta (measured in the x-y plane), and the polar angle phi (measured down from the positive z axis), and it returns the equivalent rectangular position.
Angle convention used
Conventions for naming the two angles differ between textbooks. This calculator uses the mapping where theta is the azimuth (rotation in the x-y plane) and phi is the polar angle (tilt from the +z axis). If your source swaps these names, simply swap the values you enter so the math lines up.
How to use it
Enter r, theta and phi, then pick whether your angles are in Degrees (default) or Radians. The converter scales the angles to radians internally (multiply by \(\frac{\pi}{180}\) for degrees) before applying the trig functions, then displays x, y and z to about ten significant digits.
The formula explained
The point lies on a sphere of radius \(r\). The polar angle \(\phi\) sets how far the point tilts from the vertical axis: \(z = r\cdot\cos\phi\). The horizontal projection has length \(r\cdot\sin\phi\), and the azimuth \(\theta\) splits that projection between the x and y axes, giving
$$x = r\,\sin\phi\,\cos\theta \quad\text{and}\quad y = r\,\sin\phi\,\sin\theta$$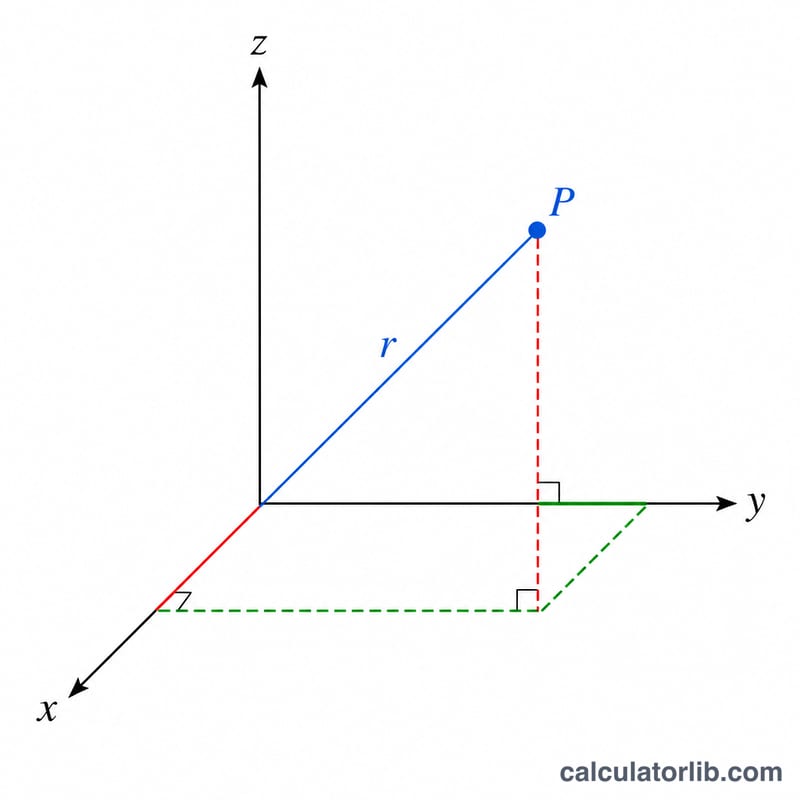
Worked example
Take r = 5, theta = 60 degrees, phi = 30 degrees. Then \(\sin\phi = 0.5\), \(\cos\phi = 0.8660254\), \(\cos\theta = 0.5\), \(\sin\theta = 0.8660254\). So
$$x = 5 \times 0.5 \times 0.5 = 1.25$$$$y = 5 \times 0.5 \times 0.8660254 = 2.16506351$$$$z = 5 \times 0.8660254 = 4.33012702$$The Cartesian point is (1.25, 2.16506351, 4.33012702).
FAQ
What if r = 0? The point is at the origin (0, 0, 0) regardless of the angles.
Can angles be negative or larger than 360? Yes. Trigonometric functions are periodic, so any real angle is valid and handled correctly.
What does phi = 0 mean? The point sits on the positive z axis: \(x = y = 0\) and \(z = r\). A phi of 180 degrees puts it on the negative z axis (\(z = -r\)).