這個轉換器的用途
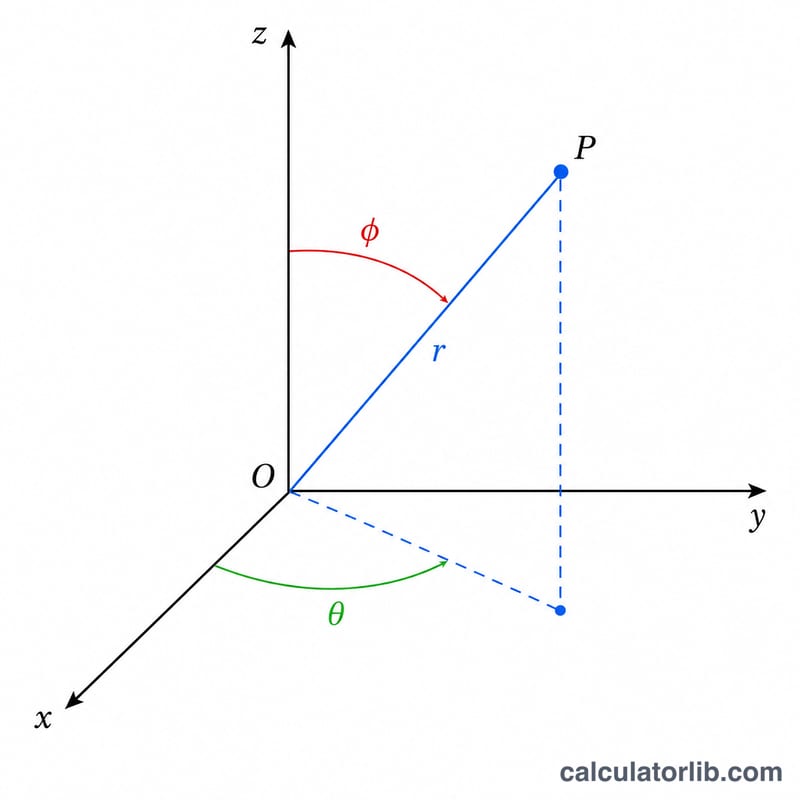
本工具可將以 3D 球座標描述的點換算成標準的直角座標 (x, y, z)。只要輸入徑向距離 \(r\)、方位角 \(\theta\)(在 x-y 平面上量測)以及極角 \(\phi\)(自 +z 軸向下量測),即可得到對應的直角座標位置。
採用的角度慣例
不同教科書對兩個角度的命名方式不盡相同。本計算器採用的對應方式為:\(\theta\) 代表方位角(在 x-y 平面上的旋轉),\(\phi\) 代表極角(自 +z 軸傾斜的角度)。如果你參考的資料把這兩個名稱對調,只要把輸入的數值對調,計算結果就會一致。
使用方式
輸入 \(r\)、\(\theta\) 與 \(\phi\),接著選擇角度的單位是「角度制」(預設)或「弧度制」。轉換器會在內部先把角度換算成弧度(角度制需乘以 \(\pi/180\)),再套用三角函數,最後顯示精確到約十位有效數字的 x、y、z 值。
公式說明
這個點位於半徑為 \(r\) 的球面上。極角 \(\phi\) 決定該點自垂直軸傾斜的程度:\(z = r\cos\phi\)。其在水平面上的投影長度為 \(r\sin\phi\),而方位角 \(\theta\) 再把這段投影分配到 x 軸與 y 軸上,於是得到 \(x = r\sin\phi\cos\theta\) 與 \(y = r\sin\phi\sin\theta\)。
$$\begin{gathered} x = r\,\sin\phi\,\cos\theta,\quad y = r\,\sin\phi\,\sin\theta,\quad z = r\,\cos\phi \\[1.5em] \text{where}\quad \left\{ \begin{aligned} r &= \text{r (radial)} \\ \theta &= \frac{\pi}{180}\cdot\text{theta (deg)} \\ \phi &= \frac{\pi}{180}\cdot\text{phi (deg)} \end{aligned} \right. \end{gathered}$$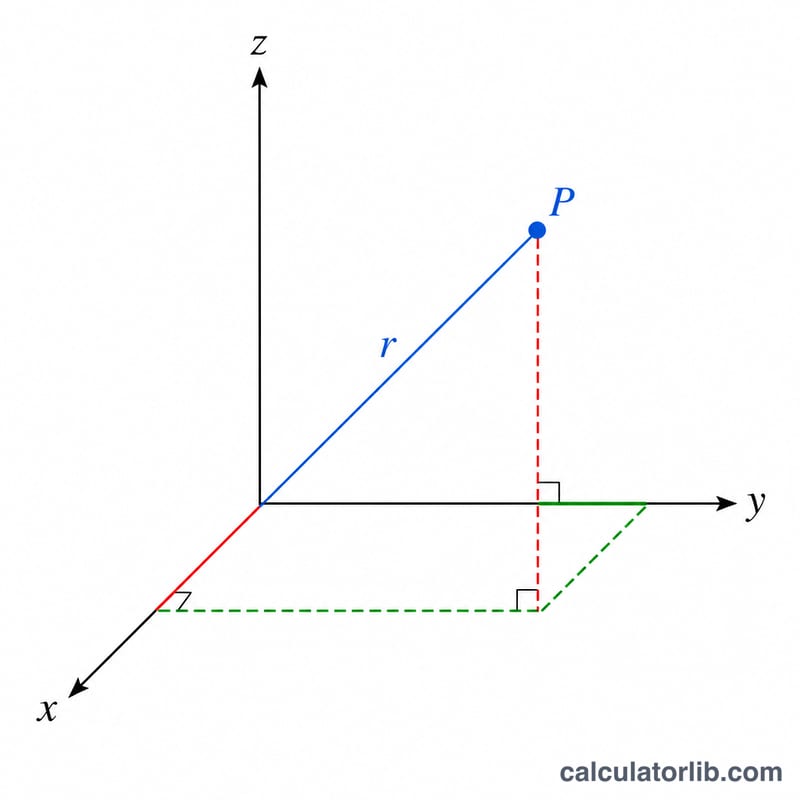
實例演算
假設 \(r = 5\)、\(\theta = 60\) 度、\(\phi = 30\) 度。則 \(\sin\phi = 0.5\)、\(\cos\phi = 0.8660254\)、\(\cos\theta = 0.5\)、\(\sin\theta = 0.8660254\)。因此
$$x = 5 \times 0.5 \times 0.5 = 1.25$$$$y = 5 \times 0.5 \times 0.8660254 = 2.16506351$$$$z = 5 \times 0.8660254 = 4.33012702$$換算後的直角座標點為 \((1.25, 2.16506351, 4.33012702)\)。
常見問題
如果 \(r = 0\) 會怎樣?無論角度為何,該點都位於原點 \((0, 0, 0)\)。
角度可以是負數或大於 360 嗎?可以。三角函數具有週期性,因此任何實數角度都有效,也能被正確處理。
\(\phi = 0\) 代表什麼?該點位於 +z 軸上:\(x = y = 0\) 且 \(z = r\)。若 \(\phi = 180\) 度,則該點落在 -z 軸上(\(z = -r\))。