這個換算器的功能
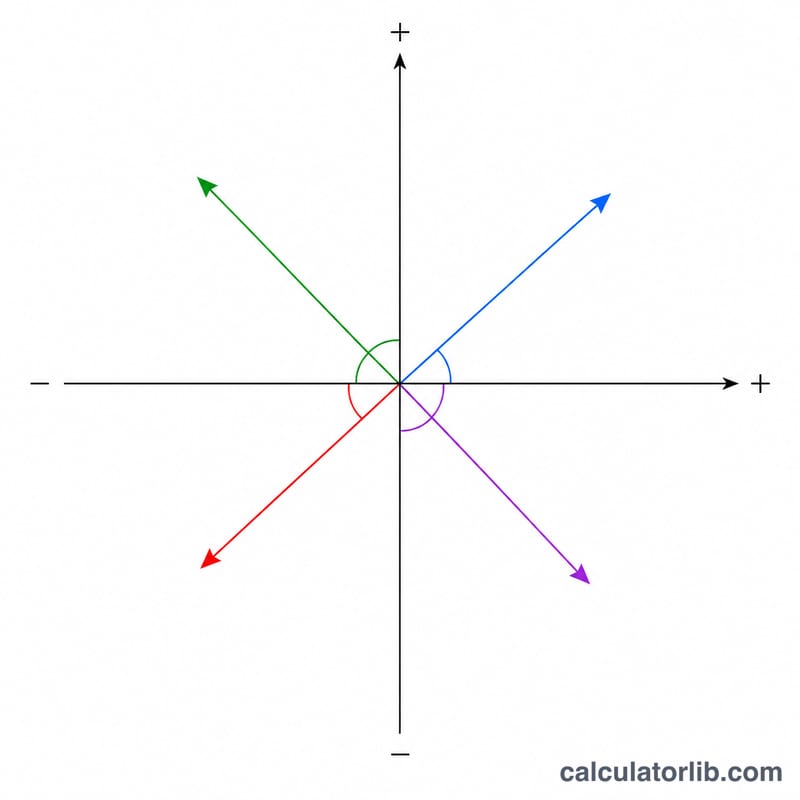
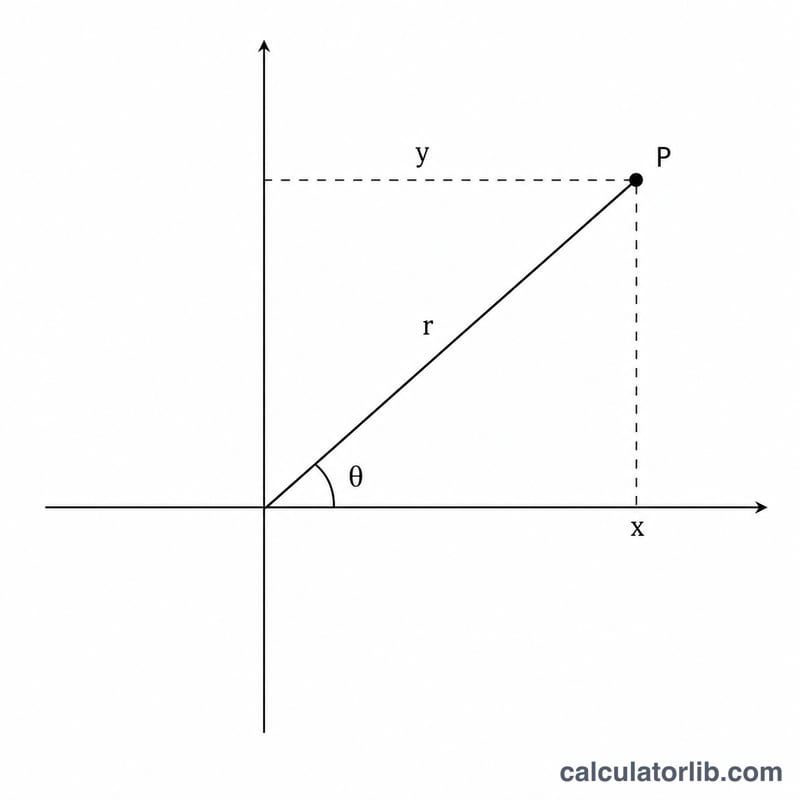
本工具可將以二維直角座標(又稱卡氏座標)表示的點 (x, y),換算成極座標 (r, θ)。其中半徑 \(r\) 是原點到該點的直線距離,角度 \(\theta\) 則是從正 x 軸起算、逆時針方向量得的夾角。\(\theta\) 可依需求顯示為度數或弧度。
使用方式
輸入 X 座標與 Y 座標,選擇角度要以度數或弧度呈現,換算器便會立即算出 \(r\) 與 \(\theta\)。座標為無單位的平面數值,因此 \(r\) 會沿用您在 x、y 所使用的長度單位。
公式說明
半徑由畢氏定理求得:$$r = \sqrt{\text{X}^{2} + \text{Y}^{2}}$$角度則使用雙參數反正切函數計算,$$\theta = \operatorname{atan2}\!\left(\text{Y},\ \text{X}\right)$$雖然許多教科書寫成 \(\theta = \arctan(y/x)\),但單純的 arctan 只會回傳 -90 至 90 度之間的角度,而且在 x = 0 時無法定義。atan2 函數正好解決了這兩個問題:它會檢查 x 與 y 的正負號,把角度落在正確的象限,回傳值範圍為 (-180, 180] 度(等同於 (-π, π] 弧度)。
範例計算
當 x = 3、y = 4:$$r = \sqrt{9 + 16} = \sqrt{25} = 5$$角度為 \(\operatorname{atan2}(4, 3) = 0.927295\) 弧度,即 \(53.130102\) 度。因此 (3, 4) 換算後為 (r = 5, θ = 53.130102 度)。
當 x = -1、y = 1(位於第二象限):\(r = \sqrt{2} = 1.414214\),\(\operatorname{atan2}(1, -1) = 135\) 度。若直接用 \(\arctan(1 / -1)\) 反而會錯誤地算出 -45 度,這正說明了為何一定要用 atan2。
常見問題
角度的範圍是多少?本工具採用 atan2 慣例,\(\theta\) 範圍為 (-180, 180] 度或 (-π, π] 弧度。若您偏好 0 至 360 的範圍,只要將任何負值加上 360 度(或 2π)即可。
在原點時會怎樣?當 x = 0 且 y = 0 時,\(r = 0\),角度在數學上無法定義;依慣例 \(\operatorname{atan2}(0, 0)\) 回傳 0,因此 \(\theta\) 會顯示為 0。
為何不直接用 arctan(y/x)?單純的 arctan 會遺失象限資訊,且在 x = 0 時會發生除以零的情況。改用 atan2 便能正確處理所有象限以及垂直軸的情形。