這個換算器的功能
本工具可將以三維直角座標 \((x, y, z)\) 表示的點,轉換為球座標 \((r, \theta, \varphi)\)。它是一款純數學工具,可接受任何實數輸入值,並讓你自由選擇兩個角度要以「度」或「弧度」呈現。
本頁採用的座標約定
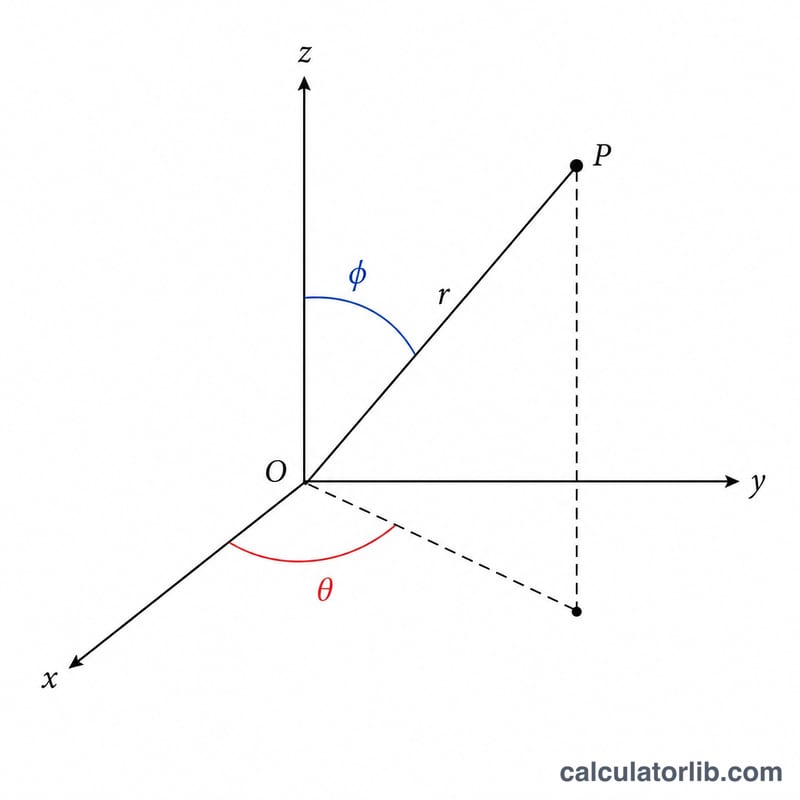
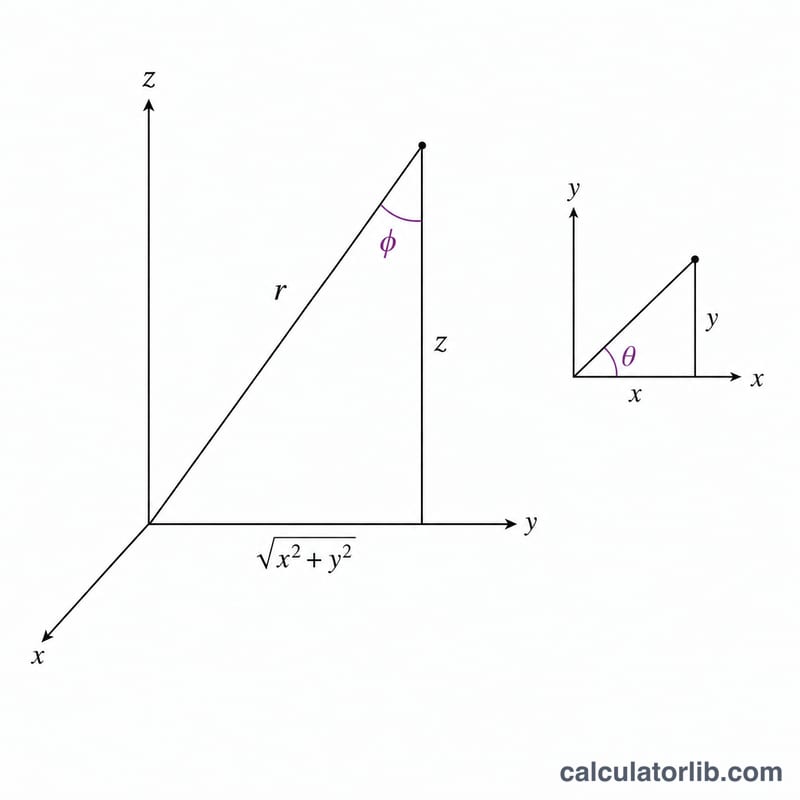
請務必依照本頁的約定來判讀結果,因為不同教科書的定義可能有所差異。在這裡,r 代表到原點的徑向距離;theta(θ) 是方位角,於 x-y 平面上自正 x 軸量起;phi(φ) 則是極角(傾角),自正 z 軸往下量起。
計算公式
$$r = \sqrt{x^2 + y^2 + z^2}$$ 角度部分採用雙參數反正切函數以確保穩定性:$$\theta = \operatorname{atan2}(y,\, x), \quad \varphi = \operatorname{atan2}\!\left(\sqrt{x^2+y^2},\, z\right)$$ 使用 atan2 而非單純的 \(\operatorname{atan}(y/x)\),可避免除以零的問題,並保留正確的象限。所有三角函數計算結果皆以弧度表示;當選擇「度」時,每個角度會再乘上 \(\frac{180}{\pi}\)。
使用方法
輸入該點的 x、y、z 三個分量,選擇角度輸出單位,即可讀取 r、theta 與 phi 的結果。r 的值與所選的角度單位無關。
範例演算
以 \(x = 3\)、\(y = 4\)、\(z = 5\)、角度以度為例:$$r = \sqrt{9 + 16 + 25} = \sqrt{50} = 7.071068$$ $$\theta = \operatorname{atan2}(4, 3) = 0.927295 \text{ 弧度} = 53.130102 \text{ 度}$$ 由於 \(\sqrt{x^2+y^2} = \sqrt{25} = 5\),故 $$\varphi = \operatorname{atan2}(5, 5) = \operatorname{atan}(1) = 0.785398 \text{ 弧度} = 45 \text{ 度}$$
常見問題
當 x = 0 時會怎樣? atan2 能妥善處理這種情況:\(x = 0\) 且 \(y > 0\) 時,\(\theta = 90\) 度;\(y < 0\) 時則 \(\theta = -90\) 度。
當 z = 0 時呢? 此時該點位於 x-y 平面上,因此 \(\varphi = 90\) 度(\(\pi/2\))。若 \(z < 0\),則正確地得出大於 90 度的 phi 值。
原點的情況如何? 若 \(x = y = z = 0\),則 \(r = 0\),兩個角度在數學上皆無定義;本工具依 atan2 的慣例,將兩者皆回報為 0。