這個換算器的功能
本工具可將三維空間中的一個點,從圓柱座標(ρ、θ、z)換算成球座標(r、θ、φ)。這是純粹的數學運算,世界各地通用,不受任何地區規則影響。本工具採用物理學/ISO 慣例:θ 為方位角(繞 z 軸旋轉的角度),φ 為極角(傾角),由 +z 軸往下量測。
採用的座標慣例
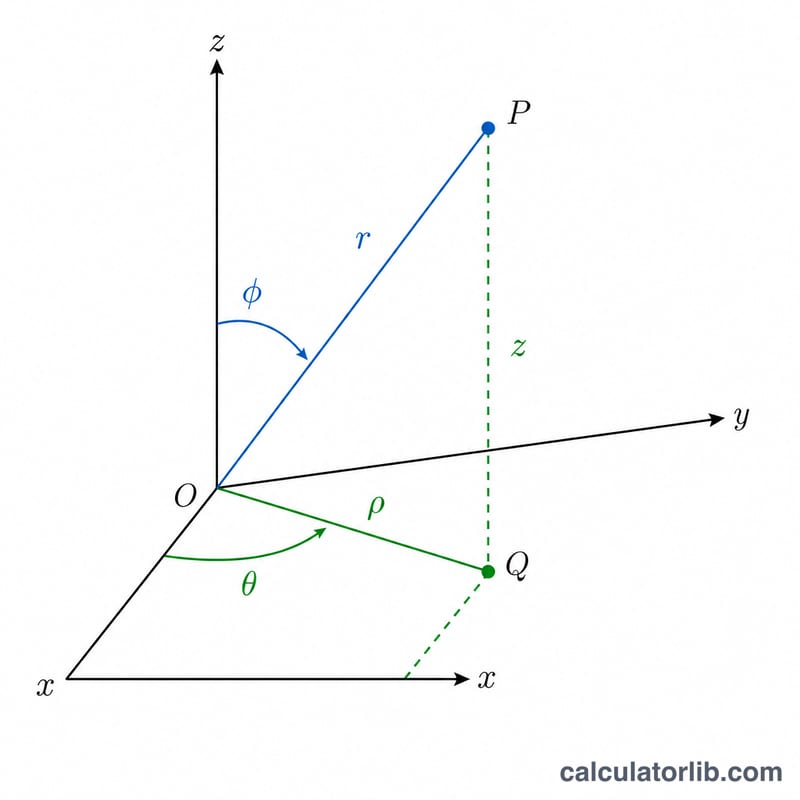
圓柱座標:ρ 是該點到 z 軸的徑向距離(ρ ≥ 0),θ 是 xy 平面上的方位角,z 則為高度。球座標:r 是該點到原點的距離,θ 與圓柱座標中的方位角完全相同(直接沿用,不會改變),φ 是由 +z 軸往下量測的角度。由於 r 與 φ 只取決於 ρ 和 z,方位角 θ 在兩種座標系統之間始終保持不變。
使用方式
輸入 ρ、θ 與 z,選擇你的角度是以「度」還是「弧度」表示,再設定顯示的精確位數。換算結果會列出 r、維持不變的 θ,以及計算所得的 φ,並以你所選的角度單位呈現。
公式說明
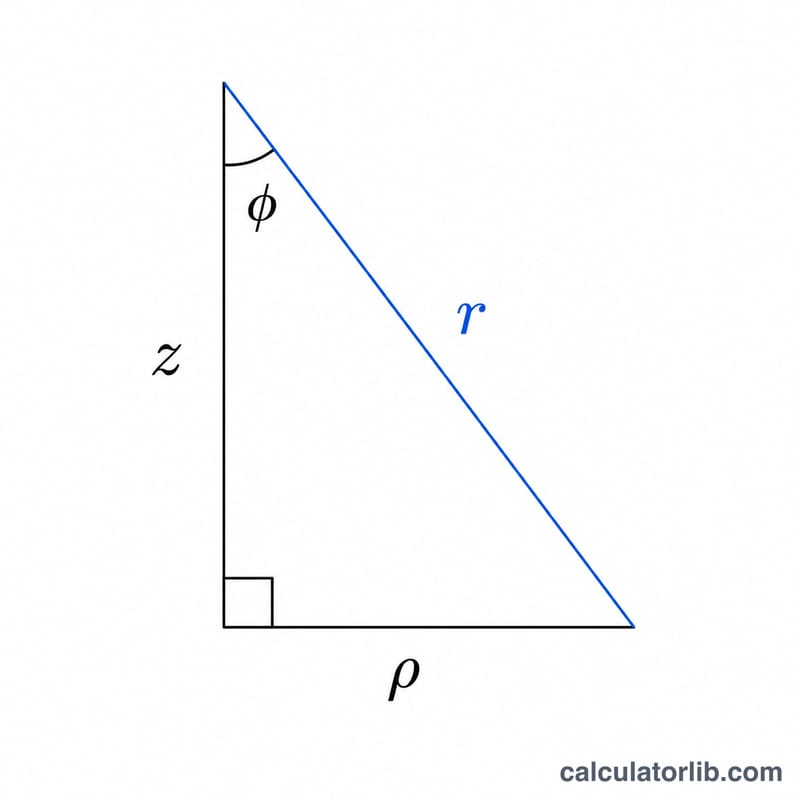
徑向距離可透過包含 z 軸與該點的平面,運用畢氏定理求得:$$r = \sqrt{\rho^{2} + z^{2}}$$極角則為 $$\varphi = \operatorname{atan2}\!\left(\rho,\; z\right)$$我們採用 atan2 而非 \(\operatorname{atan}(\rho/z)\),是為了確保當 \(z = 0\) 時恰好得到 90°、\(z < 0\) 時回傳大於 90° 的角度,且結果始終落在 \([0, \pi]\) 範圍內。
實例演算
當 \(\rho = 3\)、\(\theta = 60°\)、\(z = 4\) 時:$$r = \sqrt{9 + 16} = \sqrt{25} = 5$$$$\varphi = \operatorname{atan2}(3,\, 4) = \operatorname{atan}(0.75) = 36.86989765°$$θ 維持 60° 不變。因此球座標為 (5, 60°, 36.86989765°)。
常見問題
為什麼 θ 不會改變?兩種座標系統都以相同方式繞 z 軸量測方位角,因此可直接沿用。
當 z = 0 時會發生什麼?此時該點落在 xy 平面上,所以 \(\varphi = 90°\)(\(\pi/2\))。atan2 能直接處理這種情況,不會發生除以零的問題。
如果 ρ = 0 且 z = 0 呢?此時該點即為原點:\(r = 0\),而 φ 在數學上無定義(本工具回傳 0)。