这个换算器能做什么
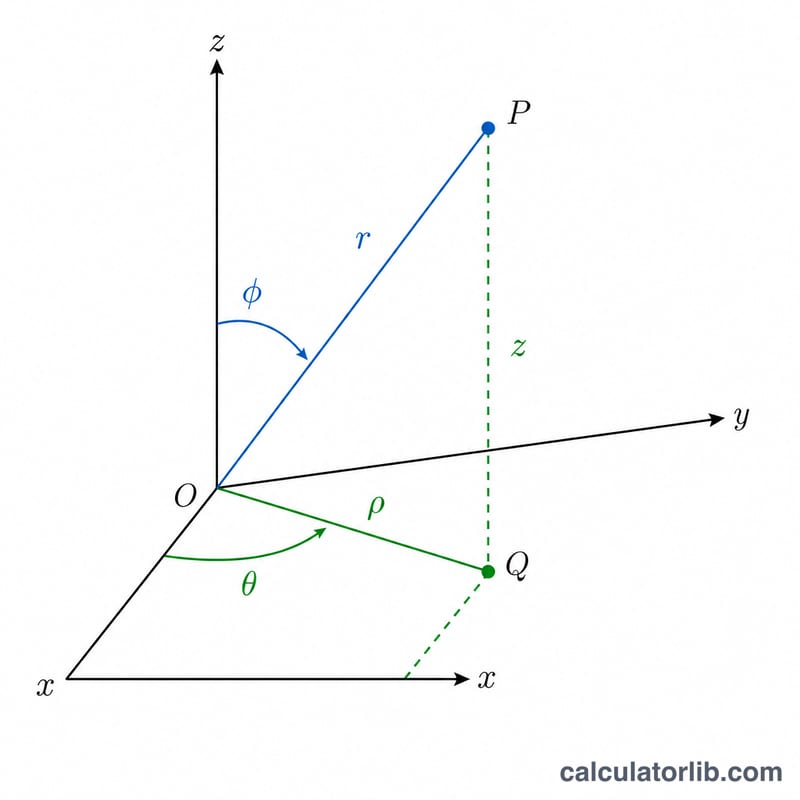
本工具可将三维空间中的一个点从柱坐标(ρ、θ、z)换算为球坐标(r、θ、φ)。这是纯数学运算,全球通用,不涉及任何地区性规则。工具采用物理学/ISO 约定:θ 为方位角(绕 z 轴旋转的角度),φ 为极角(倾角),即从 +z 轴向下测量的角度。
采用的角度约定
柱坐标:ρ 是到 z 轴的径向距离(\(\rho \geq 0\)),θ 是 xy 平面内的方位角,z 是高度。球坐标:r 是到原点的距离,θ 仍是同一个方位角(原样保留不变),φ 是从 +z 轴向下测量的夹角。由于 r 和 φ 只取决于 ρ 与 z,因此方位角 θ 在两套坐标系之间始终保持不变。
使用方法
输入 ρ、θ 和 z,选择角度的单位是角度制还是弧度制,再设定显示精度。结果会给出 r、保持不变的 θ,以及计算得到的 φ,且 φ 使用你所选的同一角度单位。
公式详解
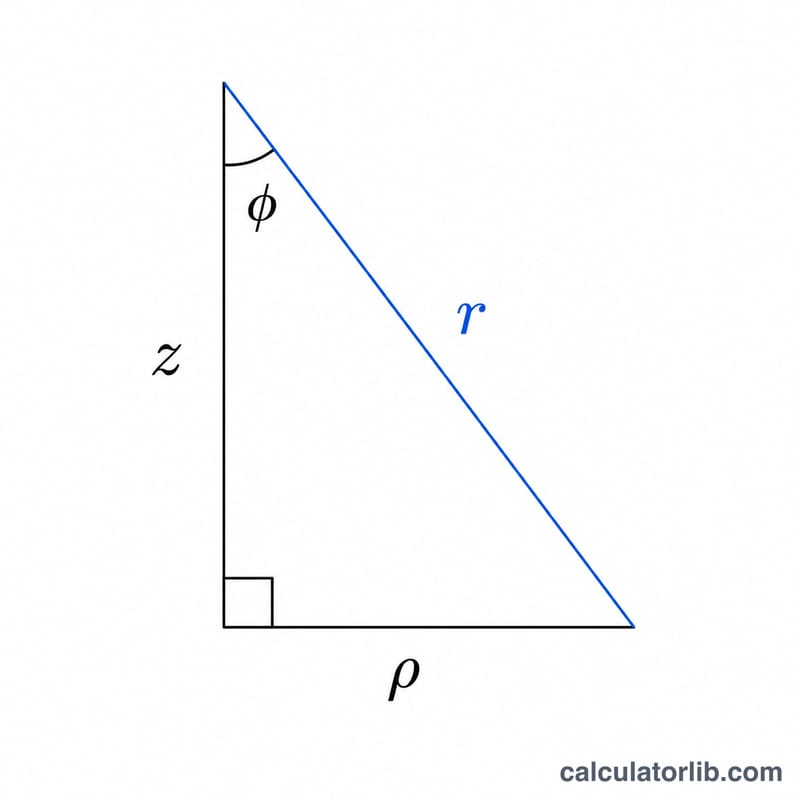
径向距离可在包含 z 轴与该点的平面内,用勾股定理求得:
$$r = \sqrt{\rho^{2} + z^{2}}$$极角为
$$\varphi = \operatorname{atan2}\!\left(\rho,\; z\right)$$这里使用 atan2 而非 \(\operatorname{atan}(\rho/z)\),是为了保证:当 \(z = 0\) 时恰好得到 90°,当 \(z < 0\) 时返回大于 90° 的角度,并且结果始终落在 \([0, \pi]\) 区间内。
计算实例
设 \(\rho = 3\)、\(\theta = 60°\)、\(z = 4\):
$$r = \sqrt{9 + 16} = \sqrt{25} = 5$$$$\varphi = \operatorname{atan2}(3, 4) = \operatorname{atan}(0.75) = 36.86989765°$$θ 保持 60° 不变。因此球坐标为 \((5,\; 60°,\; 36.86989765°)\)。
常见问题
为什么 θ 不变?两套坐标系都以同样的方式绕 z 轴测量方位角,所以它直接沿用过来即可。
当 z = 0 时会怎样?该点位于 xy 平面内,因此 \(\varphi = 90°\)(\(\pi/2\))。atan2 能妥善处理这种情况,不会出现除以零的问题。
如果 ρ = 0 且 z = 0 呢?该点即为原点:\(r = 0\),而 φ 在数学上无定义(本工具返回 0)。