이 변환기가 하는 일
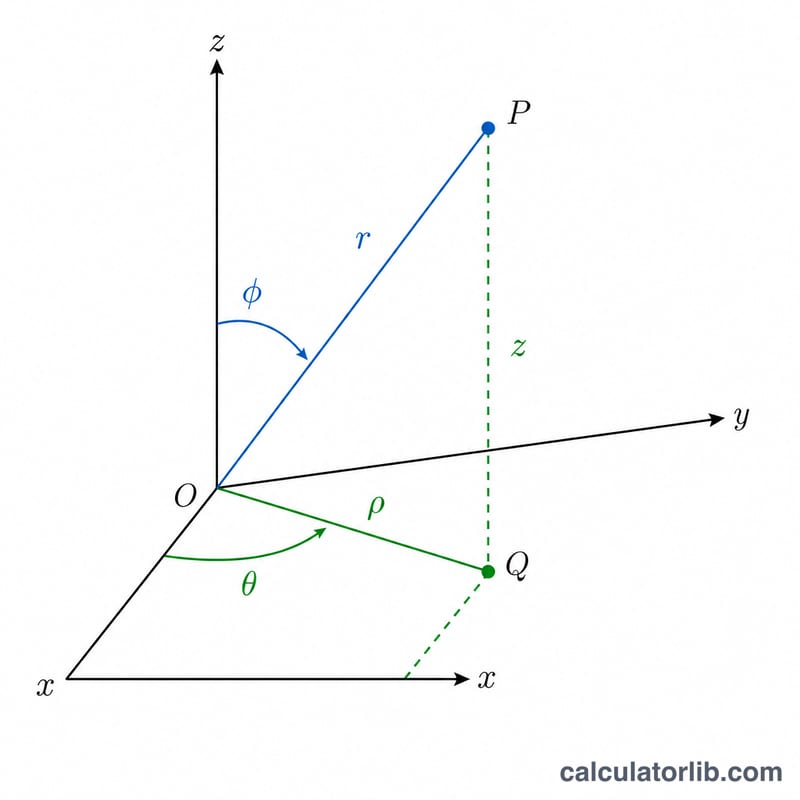
이 도구는 3차원 공간상의 한 점을 원통좌표(ρ, θ, z)에서 구면좌표(r, θ, φ)로 변환합니다. 순수한 수학 계산이므로 국가나 지역에 따른 규칙 차이 없이 어디서나 동일하게 적용됩니다. 이 변환기는 물리학·ISO 표준 규약을 따릅니다. 즉, θ는 z축을 중심으로 회전하는 방위각(azimuthal angle)이고, φ는 +z축에서부터 아래로 측정한 극각(polar angle, 천정각)입니다.
사용하는 좌표 규약
원통좌표: ρ는 z축으로부터의 반지름 거리(ρ ≥ 0), θ는 xy평면에서의 방위각, z는 높이입니다. 구면좌표: r은 원점으로부터의 거리, θ는 원통좌표와 동일한 방위각(그대로 유지됨), φ는 +z축에서부터 내려간 각도입니다. r과 φ는 오직 ρ와 z에만 의존하기 때문에, 방위각 θ는 두 좌표계 사이에서 결코 변하지 않습니다.
사용 방법
ρ, θ, z 값을 입력한 뒤, 각도 단위를 도(°)로 할지 라디안으로 할지 선택하고 표시할 정밀도를 정하세요. 결과로는 r, 변하지 않은 θ, 그리고 계산된 φ가 선택한 각도 단위로 함께 표시됩니다.
공식 풀이
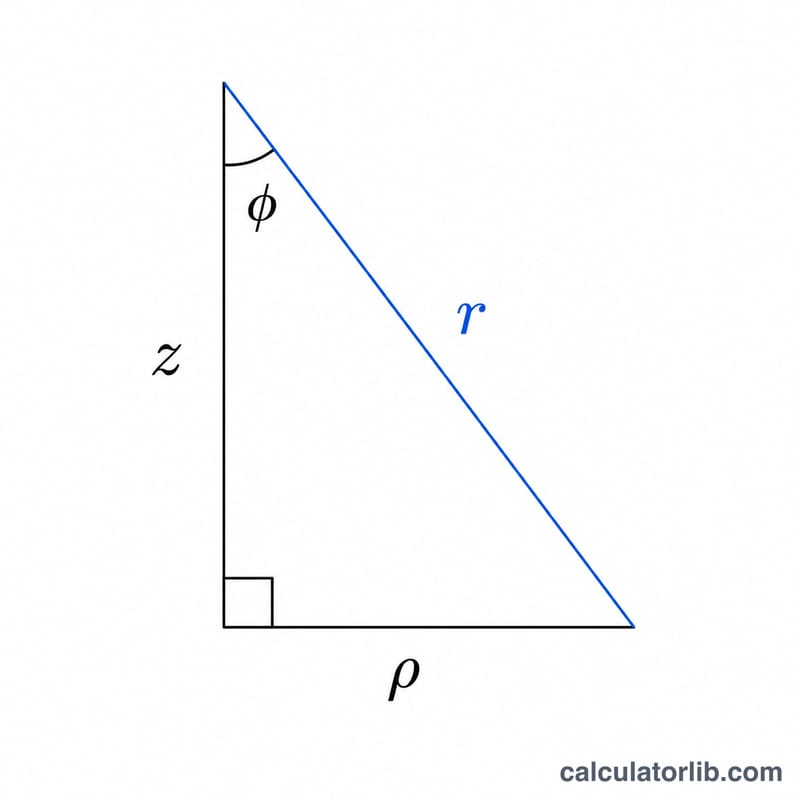
반지름 거리는 z축과 해당 점을 포함하는 평면에서 피타고라스 정리를 적용해 구합니다. $$r = \sqrt{\rho^{2} + z^{2}}$$ 극각은 $$\varphi = \operatorname{atan2}\!\left(\rho,\; z\right)$$로 계산합니다. \(\operatorname{atan}(\rho/z)\) 대신 \(\operatorname{atan2}\)를 사용하는 이유는, \(z = 0\)일 때 정확히 90°가 나오고, \(z < 0\)일 때 90°보다 큰 각도가 반환되며, 결과값이 항상 \([0, \pi]\) 범위 안에 들어오기 때문입니다.
계산 예시
\(\rho = 3\), \(\theta = 60°\), \(z = 4\)인 경우: $$r = \sqrt{9 + 16} = \sqrt{25} = 5$$ $$\varphi = \operatorname{atan2}(3, 4) = \operatorname{atan}(0.75) = 36.86989765°$$ \(\theta\)는 60° 그대로 유지됩니다. 따라서 구면좌표는 \((5,\ 60°,\ 36.86989765°)\)가 됩니다.
자주 묻는 질문
왜 θ는 변하지 않나요? 두 좌표계 모두 z축을 기준으로 방위각을 동일한 방식으로 측정하기 때문에, θ는 그대로 이어집니다.
z = 0이면 어떻게 되나요? 점이 xy평면 위에 있으므로 \(\varphi = 90°\)(\(\pi/2\))가 됩니다. \(\operatorname{atan2}\)가 0으로 나누는 문제 없이 이 경우를 처리합니다.
ρ = 0이고 z = 0이면요? 그 점은 원점입니다. \(r = 0\)이고 \(\varphi\)는 수학적으로 정의되지 않습니다(이 도구는 0을 반환합니다).