이 변환기의 기능
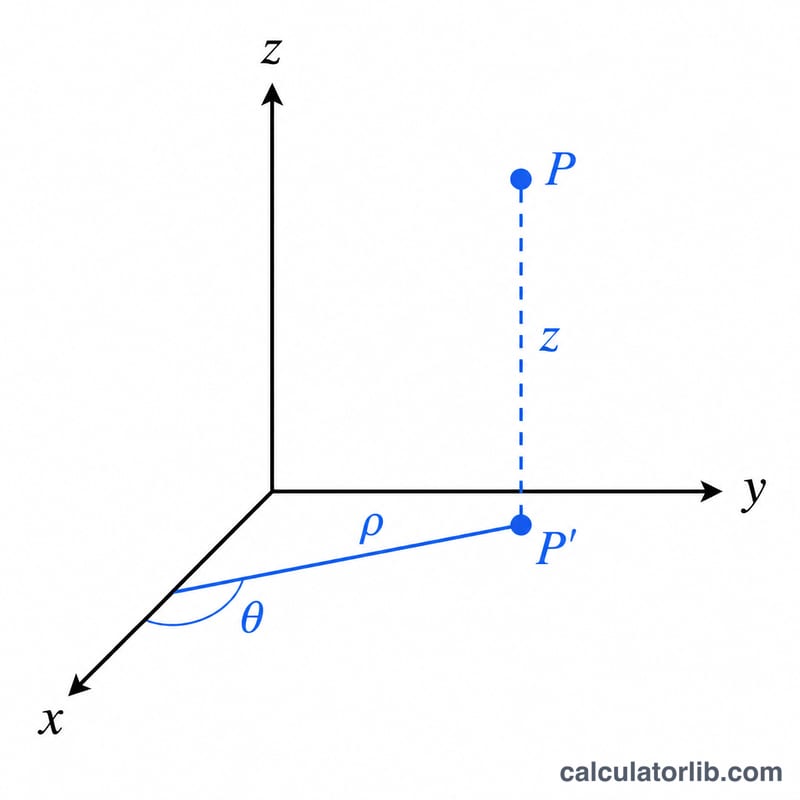
직교좌표 → 원통좌표 변환기는 직교좌표(x, y, z)로 주어진 점을 원통좌표(ρ, θ, z)로 바꿔 줍니다. 원통좌표는 3차원 공간의 한 점을 z축으로부터의 반지름 거리(ρ), z축을 도는 방위각(θ), 그리고 높이(z)로 나타냅니다. 이 좌표계는 물리학과 공학을 비롯해 파이프, 전선, 전자기장처럼 한 축을 중심으로 회전 대칭을 갖는 문제에서 폭넓게 쓰입니다.
사용 방법
직교좌표 성분 x, y, z 세 값을 입력하세요. 출력되는 각도 θ를 도(°)로 받을지 라디안으로 받을지 선택합니다. 변환기는 ρ(항상 0 이상), 선택한 단위의 θ, 그리고 변하지 않고 그대로 전달되는 z를 돌려줍니다.
공식 설명
변환에는 다음 관계식을 사용합니다.
$$\rho = \sqrt{\text{x}^{2} + \text{y}^{2}}, \quad z = \text{z}$$$$\theta = \operatorname{atan2}\!\left(\text{y},\ \text{x}\right) \cdot \frac{180}{\pi}$$\(\rho = \sqrt{\text{x}^{2} + \text{y}^{2}}\)는 점을 xy평면에 투영했을 때 z축에서 그 점까지의 거리입니다. \(\theta = \operatorname{atan2}(\text{y}, \text{x})\)는 양의 x축으로부터 잰 각도입니다. 단순한 \(\arctan(\text{y}/\text{x})\) 대신 인수가 두 개인 atan2 함수를 쓰는 이유는, 올바른 사분면을 자동으로 선택하고 x = 0인 경우에도 0으로 나누는 오류 없이 처리하기 위해서입니다. z좌표는 그대로 유지됩니다. 각도를 도(°)로 요청하면 라디안 결과에 \(180/\pi\)를 곱합니다.
계산 예시
x = 3, y = 4, z = 5를 도(°) 단위로 출력하는 경우: \(\rho = \sqrt{9 + 16} = \sqrt{25} = 5\). \(\theta = \operatorname{atan2}(4, 3) = 0.927295 \text{ rad} = 53.1301°\). z = 5. 따라서 원통좌표는 (5, 53.1301°, 5)가 됩니다. 라디안으로는 \(\theta = 0.927295 \text{ rad}\)입니다.
자주 묻는 질문
x와 y가 둘 다 0이면 어떻게 되나요? 이때 \(\rho = 0\)이고 θ는 수학적으로 정의되지 않습니다. atan2의 관례에 따라 결과는 0으로 표시됩니다.
θ가 왜 음수로 나올 수 있나요? atan2는 (-180°, 180°] (또는 \((-\pi, \pi]\)) 범위의 값을 반환합니다. θ를 0~360° 범위로 나타내려면 음수 결과에 360°(또는 \(2\pi\))를 더하면 됩니다.
z 값도 바뀌나요? 아니요. z좌표는 직교좌표계와 원통좌표계에서 완전히 동일합니다.