この変換ツールについて
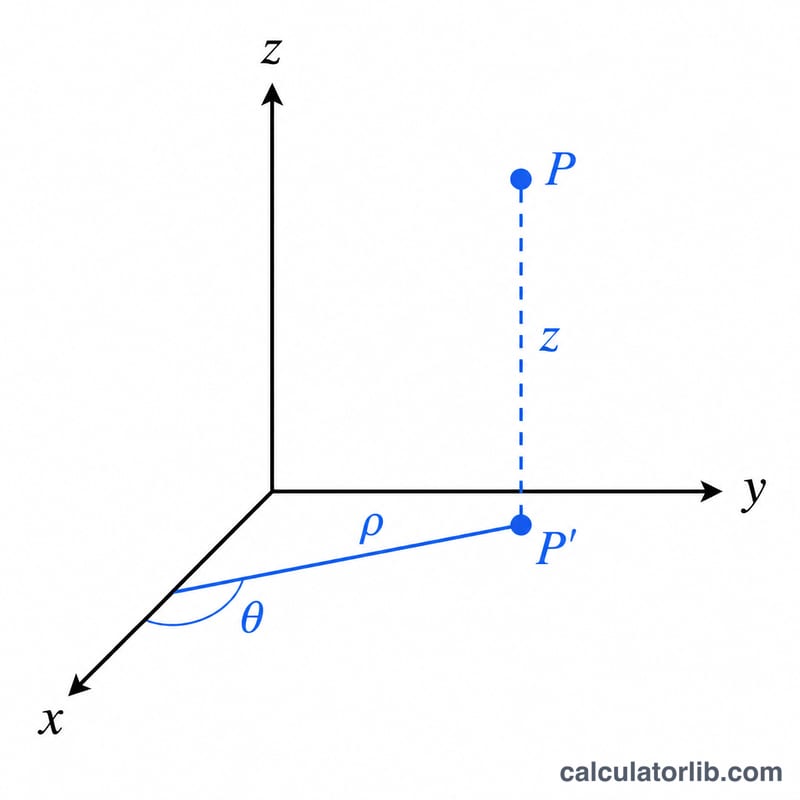
「直交座標から円柱座標への変換」ツールは、直交座標(x, y, z)で与えられた点を円柱座標(ρ, θ, z)へ変換します。円柱座標は、3次元空間内の点を、z軸からの動径距離(ρ)、z軸まわりの方位角(θ)、そして高さ(z)の3つで表す座標系です。パイプや電線、電磁場など、ある軸に対して回転対称性をもつ問題で広く用いられ、物理学や工学の分野で欠かせない座標系となっています。
使い方
直交座標の3成分 \(x\)、\(y\)、\(z\) を入力してください。出力する角度 \(\theta\) の単位は、度数法(度)または弧度法(ラジアン)から選べます。計算結果として、\(\rho\)(常に0以上)、選んだ単位の \(\theta\)、そしてそのまま引き継がれる \(z\) が表示されます。
計算式の解説
変換には次の関係式を用います。
$$\begin{gathered} \rho = \sqrt{\text{x}^{2} + \text{y}^{2}}, \quad z = \text{z} \\[1.5em] \theta = \operatorname{atan2}\!\left(\text{y},\ \text{x}\right) \cdot \frac{180}{\pi} \end{gathered}$$\(\rho = \sqrt{\text{x}^{2} + \text{y}^{2}}\) は、点を xy 平面に投影したときの z 軸から点までの距離を表します。\(\theta = \operatorname{atan2}(\text{y}, \text{x})\) は、正の x 軸からの角度です。ここで単純な \(\arctan(\text{y}/\text{x})\) ではなく、2引数の atan2 関数を使うことで、正しい象限が選択され、\(x = 0\) の場合もゼロ除算を起こさずに処理できます。z 座標はそのまま変化しません。角度を度数法で求める場合は、ラジアンの結果に \(\frac{180}{\pi}\) を掛けて換算します。
計算例
\(x = 3\)、\(y = 4\)、\(z = 5\) を度数法で出力する場合:
$$\rho = \sqrt{9 + 16} = \sqrt{25} = 5$$$$\theta = \operatorname{atan2}(4, 3) = 0.927295\ \text{rad} = 53.1301°$$\(z = 5\)。したがって円柱座標は \((5,\ 53.1301°,\ 5)\) となります。弧度法では \(\theta = 0.927295\ \text{rad}\) です。
よくある質問
x と y がどちらも 0 のときは? このとき \(\rho = 0\) となり、\(\theta\) は数学的には定義されません。atan2 の慣例に従い、結果は 0 として表示されます。
θ が負の値になるのはなぜ? atan2 は \((-180°, 180°]\)(または \((-\pi, \pi]\))の範囲で値を返します。\(\theta\) を 0〜360° の範囲で表したい場合は、負の結果に 360°(または \(2\pi\))を加えてください。
z の値は変わりますか? いいえ。z 座標は直交座標でも円柱座標でも同じ値のままです。