この変換ツールについて
このツールは、3次元の直交座標(x, y, z)で与えられた点を球座標(r, θ, φ)に変換します。純粋な数学計算ツールであり、任意の実数値を入力できます。また、2つの角度を度(°)で表示するかラジアンで表示するかを選べます。
このページで採用している定義
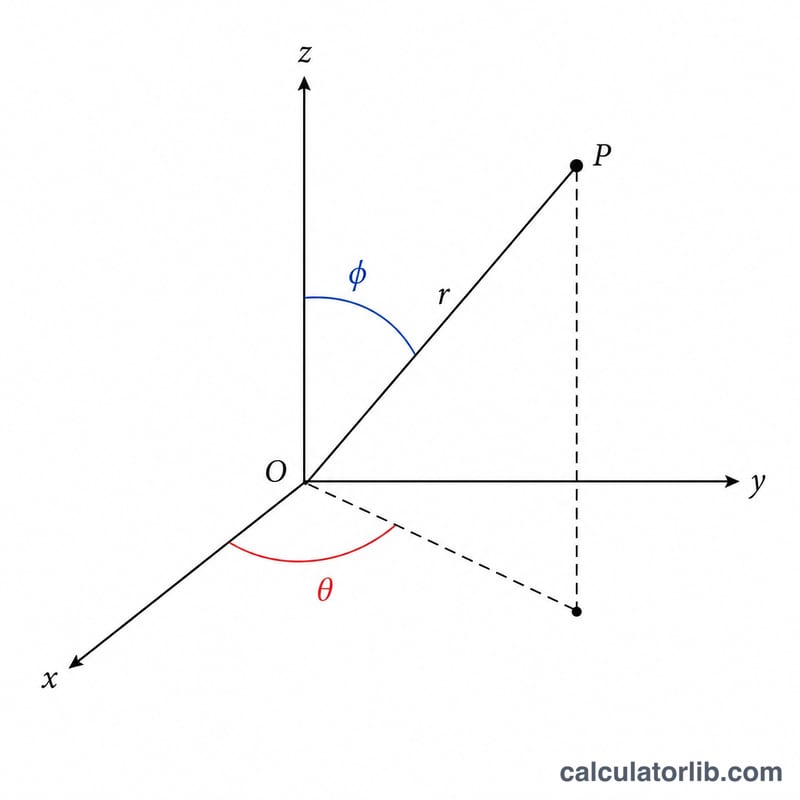
角度の定義は教科書によって異なる場合があるため、必ずこのページの定義に従ってください。ここでは r を原点からの動径距離、θ をx-y平面上でx軸正方向から測った方位角、φ をz軸正方向から下向きに測った天頂角(傾斜角)とします。
計算式
\(r = \sqrt{x^2 + y^2 + z^2}\) で求められます。角度は安定性を高めるため2引数の逆正接(atan2)を用います。\(\theta = \operatorname{atan2}(y,\, x)\)、\(\varphi = \operatorname{atan2}\!\left(\sqrt{x^2+y^2},\, z\right)\) です。単純な \(\operatorname{atan}(y/x)\) ではなく atan2 を使うことで、ゼロ除算を避けつつ正しい象限を保つことができます。三角関数の計算結果はラジアンで得られ、「度」を選択した場合は各角度に \(180/\pi\) を掛けて変換します。
$$ r = \sqrt{x^2 + y^2 + z^2} $$ $$ \theta = \operatorname{atan2}(y,\, x), \quad \varphi = \operatorname{atan2}\!\left(\sqrt{x^2+y^2},\, z\right) $$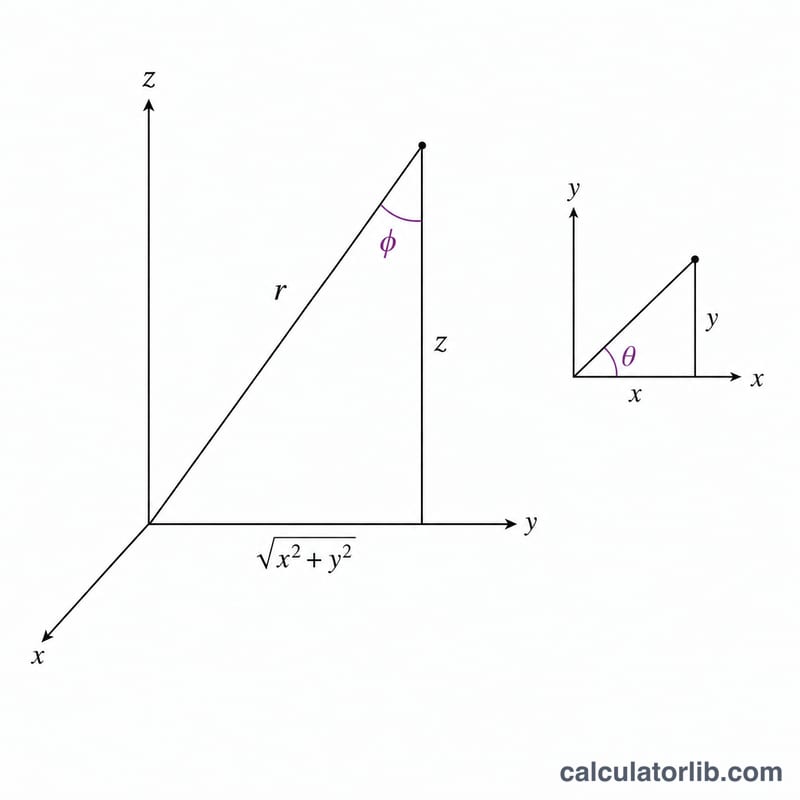
使い方
点のx、y、z成分を入力し、出力する角度の単位を選ぶと、r、θ、φが表示されます。rは選択した角度の単位に関係なく一定です。
計算例
x = 3、y = 4、z = 5 を度で出力する場合:\(r = \sqrt{9 + 16 + 25} = \sqrt{50} = 7.071068\)。\(\theta = \operatorname{atan2}(4, 3) = 0.927295\ \text{rad} = 53.130102°\)。\(\sqrt{x^2+y^2} = \sqrt{25} = 5\) なので、\(\varphi = \operatorname{atan2}(5, 5) = \operatorname{atan}(1) = 0.785398\ \text{rad} = 45°\) となります。
よくある質問
x = 0 のときはどうなりますか? atan2 が適切に処理します。x = 0 で y > 0 のとき θ = 90°、y < 0 のとき θ = -90° になります。
z = 0 のときは? 点はx-y平面上にあるため、φ = 90°(π/2)になります。z < 0 の場合は正しく φ が90°より大きい値になります。
原点のときは? x = y = z = 0 のときは r = 0 となり、角度は数学的には定義されません。このツールでは atan2 の慣例に従い、どちらの角度も0として表示します。