什麼是球座標轉柱座標換算器?
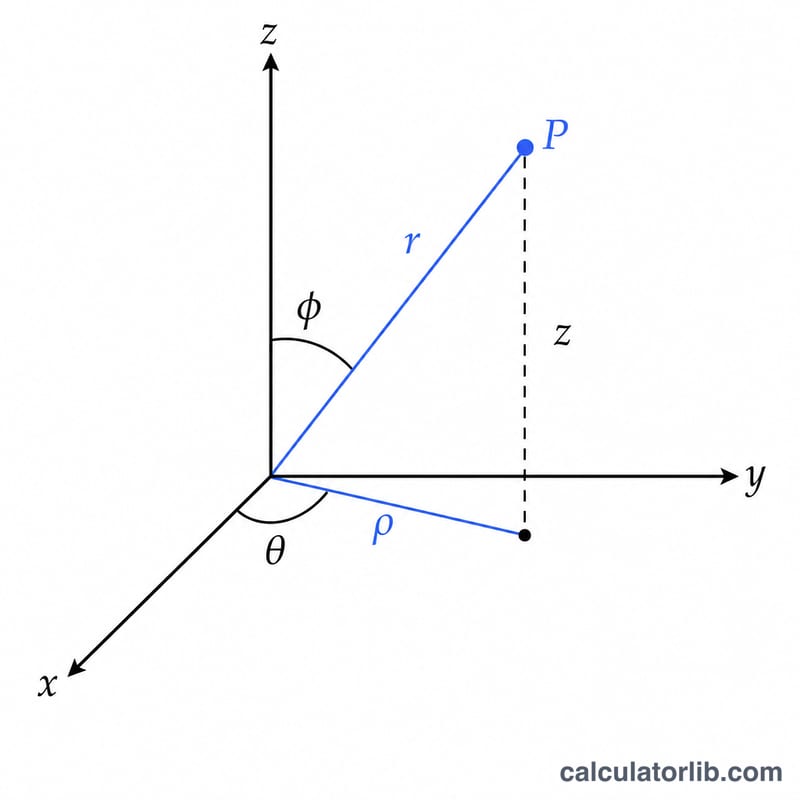
這個工具能將以球座標表示的 3D 空間點換算成柱座標。它採用常見的物理/ISO 慣例,其中 r 是從原點算起的徑向距離、θ 是在 x-y 平面上量測的方位角,而 φ 則是從正 z 軸往下量測的極角(天頂角)。要特別注意:部分數學教科書會把 θ 與 φ 的角色互換,因此使用前請務必確認你的資料來源採用哪一種慣例。
使用方法
輸入徑向距離 \(r\)、方位角 \(\theta\) 以及極角 \(\phi\)。透過角度單位選項,選擇你的角度是以「度」還是「弧度」表示(此設定會同時套用到兩個角度)。你也可以視需要設定顯示精度。換算器會回傳柱座標的半徑 \(\rho\)、維持不變的方位角 \(\theta\),以及沿軸方向的高度 \(z\)。
公式說明
方位角 \(\theta\) 在兩種座標系中完全相同,因此會原封不動地保留下來。另外兩個座標,則是將徑向距離分別投影到 x-y 平面與 z 軸上而得:
$$\rho = r \cdot \sin\phi, \quad \theta = \theta\ (\text{不變}), \quad z = r \cdot \cos\phi$$在內部運算時,角度會先換算成弧度(將度數乘以 \(\pi/180\)),因為三角函數的輸入必須是弧度。
範例演算
假設 \(r = 5\)、\(\theta = 60°\)、\(\phi = 30°\)。先把 \(\phi\) 換算成弧度:\(30 \times \pi/180 = 0.5236\) 弧度。接著 \(\rho = 5 \times \sin(30°) = 5 \times 0.5 = 2.5\),方位角維持在 \(60°\),而 \(z = 5 \times \cos(30°) = 5 \times 0.8660254 = 4.330127\)。因此此點的柱座標為 \((2.5, 60°, 4.330127)\)。
常見問題
為什麼 θ 不會改變? 球座標與柱座標在 x-y 平面上使用的是同一個方位角,所以 \(\theta\) 完全相同,會直接沿用不變。
如果 φ = 0 會怎樣? 此時該點落在正 z 軸上:\(\rho = 0\)、\(z = r\)。當 \(\phi = 90°\) 時,該點位於 x-y 平面上(\(\rho = r\)、\(z = 0\));當 \(\phi = 180°\) 時,則落在負 z 軸上(\(\rho = 0\)、\(z = -r\))。
ρ 有可能是負值嗎? 當 \(0 \le \phi \le 180°\) 時,\(\sin\phi\) 為非負值,因此 \(\rho\) 永遠 \(\ge 0\)。標準做法是將 \(\phi\) 限制在 \([0, 180°]\) 範圍內。