直交座標から極座標への変換とは?
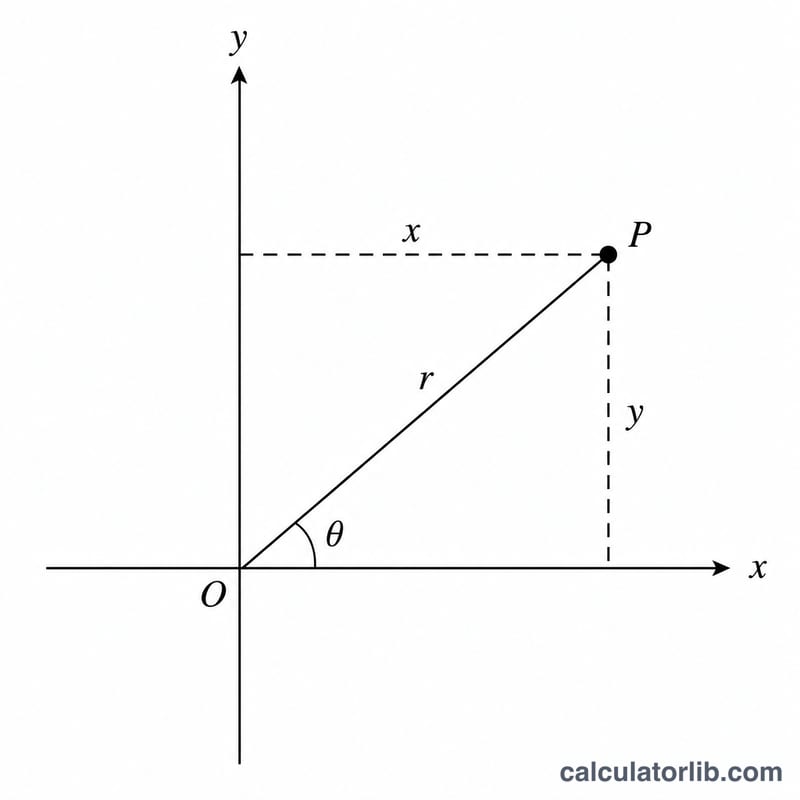
平面上の点は、2通りの方法で表すことができます。直交座標(デカルト座標)では、点を水平方向と垂直方向の距離で表し、\((x, y)\) と書きます。一方、極座標では、同じ点を原点からの距離 \(r\) と、x軸の正の向きとなす角度 \(\theta\) で表します。この計算機は、直交座標の組 \((x, y)\) を極座標 \((r, \theta)\) に変換し、\(\theta\) を度数法(度)と弧度法(ラジアン)の両方で表示します。
計算機の使い方
点の x座標 と y座標 を入力します。計算ボタンを押すと、半径 \(r\) と角度 \(\theta\) が表示されます。負の値にも完全に対応しており、角度は atan2 関数を使って計算されるため、結果は必ず正しい象限(−180°〜180°の範囲)に収まります。
計算式の解説
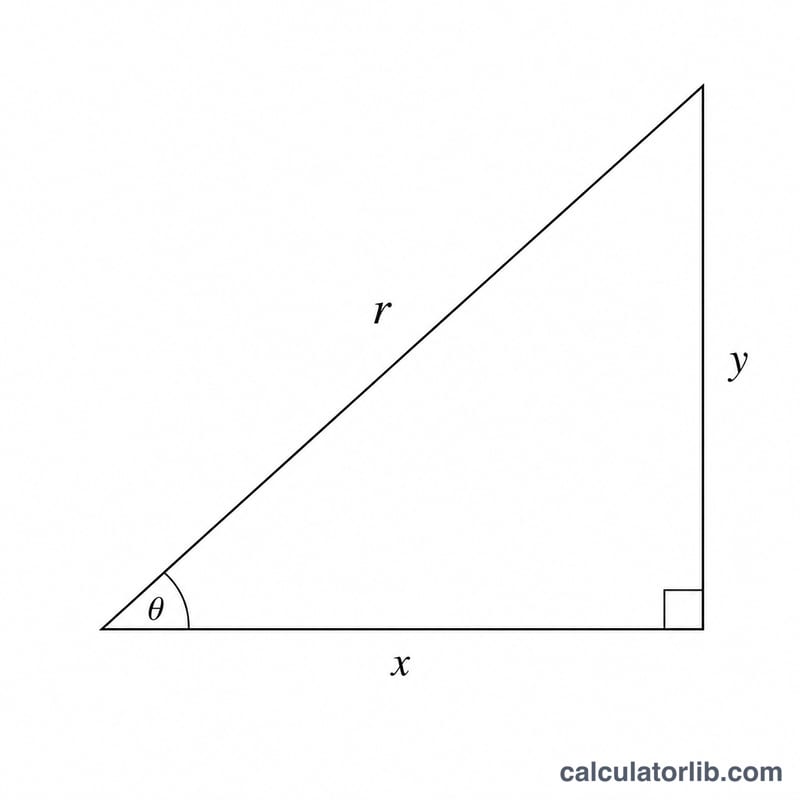
半径は、ピタゴラスの定理からそのまま求められます。x と y を直角三角形の2辺(脚)、r を斜辺と考えればよいのです。
$$r = \sqrt{x^{2} + y^{2}}$$
角度には、2引数のアークタンジェント $$\theta = \operatorname{atan2}(y,\ x)$$ を用います。単純な \(\arctan(y/x)\) とは異なり、atan2 は x と y の両方の符号を調べるため、たとえば第2象限と第4象限をきちんと区別できます。ラジアンを度に変換するには、\(180/\pi\) を掛けます。
計算例
点 \((3, 4)\) を考えてみましょう。半径は $$\sqrt{3^{2} + 4^{2}} = \sqrt{9 + 16} = \sqrt{25} = 5$$ です。角度は \(\operatorname{atan2}(4, 3) \approx 0.9273\) ラジアンで、これはおよそ \(53.13°\) にあたります。したがって、\((3, 4)\) を極座標で表すと、約 \((5, 53.13°)\) となります。
よくある質問
なぜ arctan ではなく atan2 を使うのですか? 単純な \(\arctan(y/x)\) では象限の情報が失われ、さらに \(x = 0\) のときにゼロ除算が発生してしまいます。atan2 は4つの象限すべてと座標軸上の点を正しく処理できます。
角度の範囲はどうなっていますか? この計算機は \(\theta\) を \((−180°, 180°]\) の範囲で表示します。0〜360° の値が必要な場合は、負の結果に 360° を加えてください。
x と y が両方とも 0 のときはどうなりますか? 半径は 0 となり、角度は定義されません。この計算機では慣例に従って 0° を返します。