이 계산기의 기능
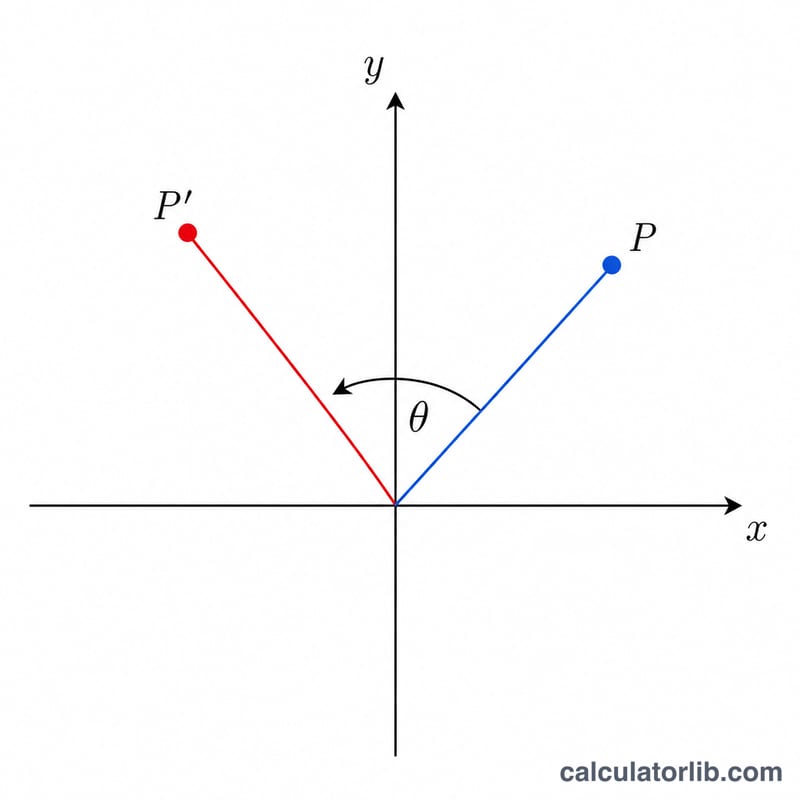
이 도구는 2D 평면 위의 한 점을 원점(0, 0)을 중심으로 원하는 각도만큼 회전시켰을 때의 새로운 위치를 계산합니다. 원점을 기준으로 한 회전은 기하학, 컴퓨터 그래픽스, 로보틱스, 물리학에서 가장 기본이 되는 변환입니다. 수학 원리는 보편적이어서 어디서나 똑같이 적용되며, 국가별로 다른 규칙은 전혀 없습니다.
사용 방법
먼저 원래 점의 좌표 \(x\)와 \(y\)를 입력하고, 회전 각도 \(\theta\)를 적은 뒤 각도 단위를 도(degree)로 할지 라디안(radian)으로 할지 선택하세요. 관례상 양의 각도는 점을 반시계 방향으로 회전시키며, 시계 방향으로 돌리려면 음수를 입력하면 됩니다. 계산 버튼을 누르면 새 좌표를 바로 확인할 수 있습니다.
공식 설명
각도 단위를 도로 선택한 경우, \(\theta_{\text{rad}} = \theta \times \pi/180\) 식으로 먼저 라디안으로 변환합니다. 그런 다음 표준 회전 공식 $$x^{\prime} = x\cos\theta - y\sin\theta, \quad y^{\prime} = x\sin\theta + y\cos\theta$$ 로 새 좌표를 구합니다. 이는 점에 회전 행렬 \(R(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}\) 를 곱하는 것과 같습니다. 회전은 강체 변환이므로 원점으로부터의 거리 \(\sqrt{x^2+y^2}\) 는 절대 변하지 않으며, 이를 이용해 결과를 손쉽게 검산할 수 있습니다.
계산 예시
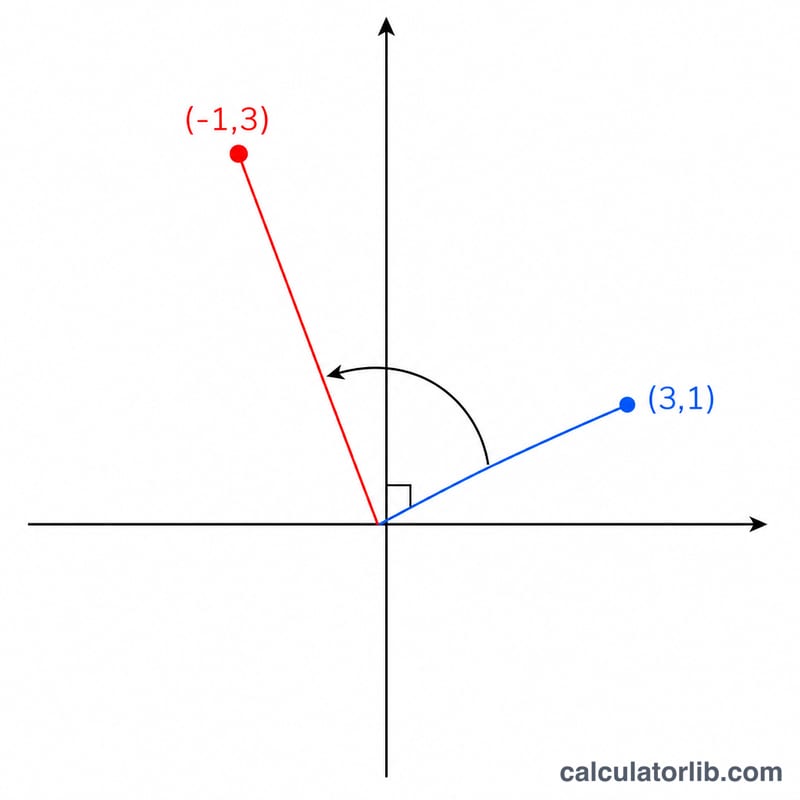
점 (3, 4)를 30° 회전시켜 봅시다. 변환하면 \(30° = 0.5236\) 라디안이므로 \(\cos = 0.866025\), \(\sin = 0.5\) 입니다. 따라서 $$x^{\prime} = 3\cdot 0.866025 - 4\cdot 0.5 = 0.598076, \quad y^{\prime} = 3\cdot 0.5 + 4\cdot 0.866025 = 4.964102$$ 가 됩니다. 회전된 점은 약 (0.598076, 4.964102)이며, 원점으로부터의 거리는 여전히 \(\sqrt{0.598076^2+4.964102^2} = 5\) 로, 원래의 \(\sqrt{3^2+4^2} = 5\) 와 정확히 일치합니다.
자주 묻는 질문
양의 각도는 어느 방향으로 회전하나요? 표준 수학 관례에 따라 반시계 방향으로 회전합니다. 시계 방향으로 돌리려면 음수 각도를 입력하세요.
원점으로부터의 거리는 왜 변하지 않나요? 회전은 등거리 변환(isometry)이어서 길이와 각도를 그대로 보존합니다. 따라서 모든 점은 회전 중심으로부터의 거리를 유지합니다.
각도가 0° 또는 360°일 때는 어떻게 되나요? 한 바퀴를 완전히 돌거나(360°) 전혀 돌지 않으면(0°) 모든 점이 제자리로 돌아오므로 점은 변하지 않습니다. 또한 원점(0, 0)은 어떤 각도에서도 항상 고정됩니다.