Qué hace esta calculadora
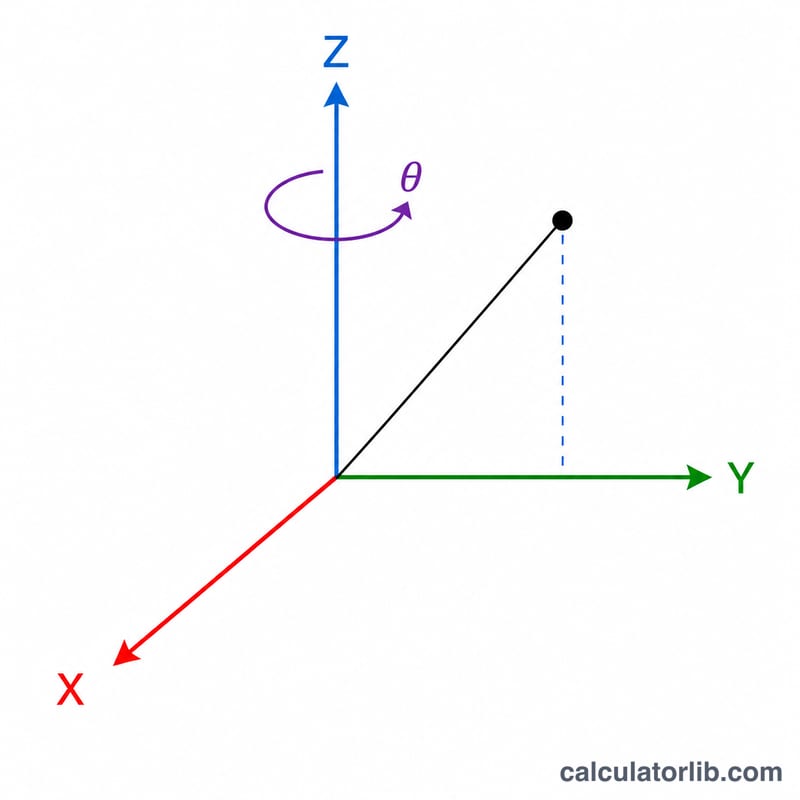
La calculadora de rotación de coordenadas 3D determina la nueva posición de un punto en el espacio tridimensional después de rotarlo en torno a los ejes X, Y o Z. Trabaja con un sistema de coordenadas dextrógiro (de mano derecha) y aplica el convenio de signos de la regla de la mano derecha: un ángulo positivo hace girar el punto en sentido antihorario cuando lo miras desde el extremo positivo del eje de rotación hacia el origen. Es geometría analítica pura y de aplicación universal, igual de válida en física, robótica, gráficos por ordenador, CAD o ingeniería.
Cómo usarla
Introduce las coordenadas iniciales (x, y, z) de tu punto. Elige si tus ángulos están en grados o en radianes. A continuación, define hasta tres pasos de rotación, cada uno con su eje y su ángulo. Los pasos se aplican en orden: el Paso 1 actúa sobre el punto original, el Paso 2 sobre el resultado del Paso 1, y así sucesivamente. Deja un ángulo en blanco o ponlo a 0 para omitir ese paso. Si solo necesitas una rotación, basta con rellenar el Paso 1.
La fórmula explicada
En cada paso, llamamos theta al ángulo en radianes, con \(c = \cos\theta\) y \(s = \sin\theta\). La rotación en torno al eje Z mantiene \(z\) fijo y transforma \((x, y)\) en \((x\cdot c - y\cdot s,\; x\cdot s + y\cdot c)\). La rotación en torno a X mantiene \(x\) fijo, y la rotación en torno a Y mantiene \(y\) fijo; en ambos casos las otras dos coordenadas se mezclan de la misma manera. Componer varias rotaciones equivale a multiplicar sus matrices de rotación, pero aplicarlas paso a paso al vector evita errores de orden.
La matriz de rotación en torno al eje Z es:
$$R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$$La rotación en torno al eje X:
$$\begin{aligned} x^{\prime} &= x \\ y^{\prime} &= y\cos\theta - z\sin\theta \\ z^{\prime} &= y\sin\theta + z\cos\theta \end{aligned}$$Y las rotaciones en torno a los ejes Y y Z:
$$\begin{aligned} x^{\prime} &= x\cos\theta + z\sin\theta,\; y^{\prime}=y,\; z^{\prime}=-x\sin\theta + z\cos\theta \\ x^{\prime} &= x\cos\theta - y\sin\theta,\; y^{\prime}=x\sin\theta + y\cos\theta,\; z^{\prime}=z \end{aligned}$$
Ejemplo resuelto
Toma el punto (1, 0, 1) y rótalo 90° en torno al eje Z. Aquí \(\theta = \pi/2\), así que \(c = 0\) y \(s = 1\). Entonces
$$x' = 1\cdot 0 - 0\cdot 1 = 0,\quad y' = 1\cdot 1 + 0\cdot 0 = 1$$y \(z'\) no cambia y vale 1. El resultado es (0, 1, 1).
Valores comunes de ángulo de rotación
Las entradas de toda matriz de rotación dependen solo de \(\cos\theta\) y \(\sin\theta\). La tabla enumera valores exactos para los ángulos más comunes para que pueda sustituirlos directamente en \(R_X\), \(R_Y\) o \(R_Z\). Se muestran aproximaciones decimales a cuatro lugares.
| \(\theta\) (grados) | \(\theta\) (rad) | \(\cos\theta\) | \(\sin\theta\) |
|---|---|---|---|
| 0° | 0 | 1 | 0 |
| 30° | \(\pi/6\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) | \(\tfrac12=0.5\) |
| 45° | \(\pi/4\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) | \(\tfrac{\sqrt2}{2}\approx0.7071\) |
| 60° | \(\pi/3\) | \(\tfrac12=0.5\) | \(\tfrac{\sqrt3}{2}\approx0.8660\) |
| 90° | \(\pi/2\) | 0 | 1 |
| 180° | \(\pi\) | −1 | 0 |
| 270° | \(3\pi/2\) | 0 | −1 |
Tenga en cuenta que una rotación de \(180^\circ\) invierte el signo de las dos coordenadas perpendiculares al eje, mientras que \(270^\circ\) es equivalente a \(-90^\circ\) (un cuarto de vuelta en sentido horario cuando se ve hacia abajo del eje positivo).
Términos y variables clave
- Sistema de coordenadas diestro
- Un marco 3D en el que los ejes X, Y y Z están orientados de modo que apuntar los dedos de la mano derecha de +X hacia +Y hace que el pulgar apunte a lo largo de +Z. La convención matemática y física estándar; estas matrices de rotación la asumen.
- Regla de la mano derecha
- Una regla mnemotécnica para el sentido positivo de rotación: apunta el pulgar de la mano derecha a lo largo del eje positivo de rotación, y el curvamiento de los dedos da la dirección positiva (antihoraria) de rotación para ese eje.
- Matriz de rotación
- Una matriz ortogonal \(3\times3\) con determinante \(+1\) que rota vectores alrededor de un eje fijo sin cambiar su longitud. Aquí \(R_X\), \(R_Y\) y \(R_Z\) rotan alrededor de los ejes X, Y y Z respectivamente.
- \(\theta\) (theta), el ángulo de rotación
- La cantidad de rotación alrededor del eje elegido. Se ingresa en grados o radianes; la herramienta convierte grados internamente con \(\theta_{\text{rad}} = \theta_{\text{deg}}\cdot\pi/180\) antes de evaluar \(\cos\theta\) y \(\sin\theta\).
- Eje de rotación
- La línea fija (X, Y o Z) en la que los puntos permanecen sin cambios mientras todo lo demás gira alrededor de ella. En esta herramienta, el eje de cada paso se selecciona como 0 = X, 1 = Y, 2 = Z.
- Dirección positiva / antihoraria
- Un ángulo positivo produce una rotación antihoraria cuando se mira desde el extremo positivo del eje hacia el origen. Un ángulo negativo lo invierte (horario).
- Coordenadas de salida \(x'\), \(y'\), \(z'\)
- Los componentes del punto rotado \(\mathbf{p}' = R\,\mathbf{p}\). Con una o más rotaciones secuenciales, \(\mathbf{p}' = R_{a_3}(\theta_3)\,R_{a_2}(\theta_2)\,R_{a_1}(\theta_1)\,\mathbf{p}\), donde la matriz más a la derecha se aplica primero.
Preguntas frecuentes
¿Cuál es el sentido positivo de rotación? Positivo significa antihorario cuando se observa desde el eje positivo mirando hacia el origen (la regla de la mano derecha).
¿Importa el orden de las rotaciones? Sí. Las rotaciones en 3D no son conmutativas, por lo que rotar primero en X y luego en Z normalmente da un resultado distinto que rotar en Z y luego en X. Esta herramienta aplica primero el Paso 1.
¿Por qué algunos resultados muestran 0 en lugar de un número diminuto? Valores como \(\cos(90°)\) no son exactamente 0 en coma flotante, así que las salidas próximas a cero se redondean a 0 para mayor claridad.