Gerçek Konum (True Position) Nedir?
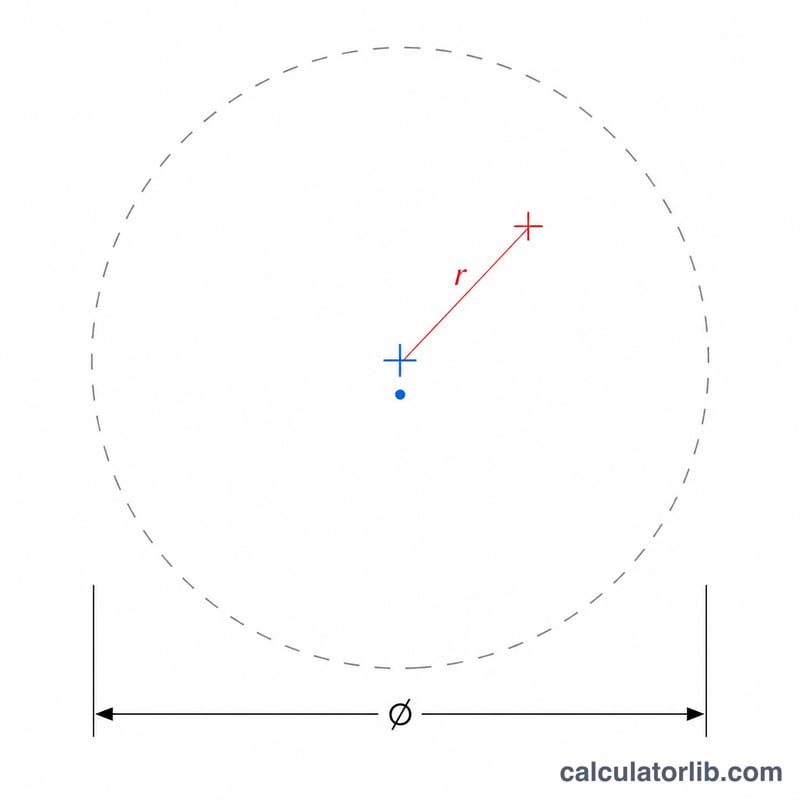
Gerçek konum, bir elemanın gerçek merkezinin teorik olarak tam (nominal) konumundan ne kadar sapabileceğini tanımlayan bir Geometrik Boyutlandırma ve Toleranslama (GD&T) kontrolüdür. Tolerans bölgesi, nominal noktayı merkez alan bir daire (2 boyutta) olduğundan, gerçek konum bir çap olarak ifade edilir; radyal sapmanın ikiyle çarpılmasının nedeni de tam olarak budur.
Bu Hesaplayıcı Nasıl Kullanılır?
Önce elemanın teorik olarak tam nominal X ve Y koordinatlarını girin, ardından muayeneden (CMM, optik komparatör vb.) elde ettiğiniz ölçülen X ve Y koordinatlarını girin. Hesaplayıcı; gerçek konum değerini (elemanı içine alacak tolerans bölgesinin çapını) X, Y ve radyal sapmalarla birlikte verir. Tüm değerlerde aynı birimi kullanın — milimetre veya inç.
Formülün Açıklaması
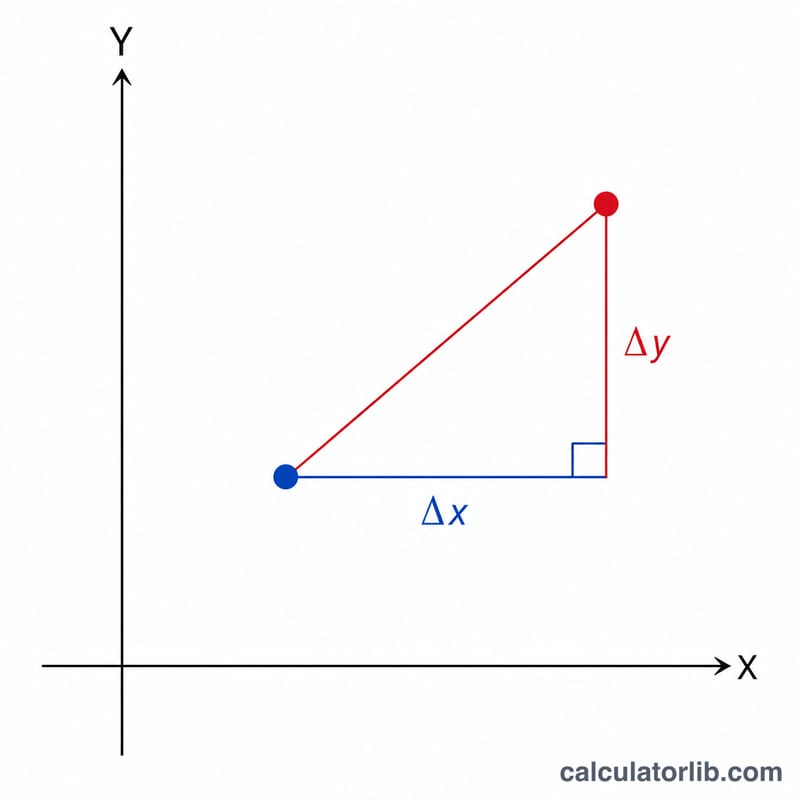
İlk olarak sapmaları bulun: \(\Delta X = X_{\text{ölçülen}} - X_{\text{nominal}}\) ve \(\Delta Y = Y_{\text{ölçülen}} - Y_{\text{nominal}}\). Radyal sapma
$$r = \sqrt{\Delta X^2 + \Delta Y^2}$$şeklindedir; bu, gerçek konuma olan fiili mesafedir. Gerçek konum ise
$$\text{TP} = 2 \times r$$olur; çünkü silindirik (dairesel) tolerans bölgesi yarıçapla değil, çapla tanımlanır.
Çözümlü Örnek
Bir delik nominal olarak (10, 10) mm konumundayken (10.3, 10.4) mm noktasında ölçülmüş olsun. \(\Delta X = 0{,}3\), \(\Delta Y = 0{,}4\) olur; dolayısıyla
$$r = \sqrt{0{,}09 + 0{,}16} = \sqrt{0{,}25} = 0{,}5 \text{ mm}$$Gerçek konum =
$$2 \times 0{,}5 = \mathbf{1{,}0 \text{ mm}}$$Bu eleman, ancak teknik resimdeki konumsal tolerans 1,0 mm veya daha büyükse (herhangi bir bonus tolerans eklenmeden önce) kabul edilebilir.
Sıkça Sorulan Sorular
Neden 2 ile çarpıyoruz? Konumsal tolerans bölgesi, çapıyla tanımlanan bir daire/silindirdir. Ölçülen nokta bu dairenin içinde \(r\) yarıçapında bir yerde bulunduğundan, gereken çap \(2r\) olur.
Bu hesaplama bonus toleransı içerir mi? Hayır. Burada yalnızca temel konumsal sapma hesaplanır. MMC/LMC değiştiricilerinden gelen bonus tolerans, izin verilen toleransınıza ayrıca eklenmelidir.
Hangi birimleri kullanmalıyım? Birbiriyle tutarlı olmak kaydıyla herhangi bir birim. Nominal ve ölçülen değerler milimetre cinsindense sonuç milimetre, inç cinsindense sonuç inç olarak çıkar.