Vị trí thực (True Position) là gì?
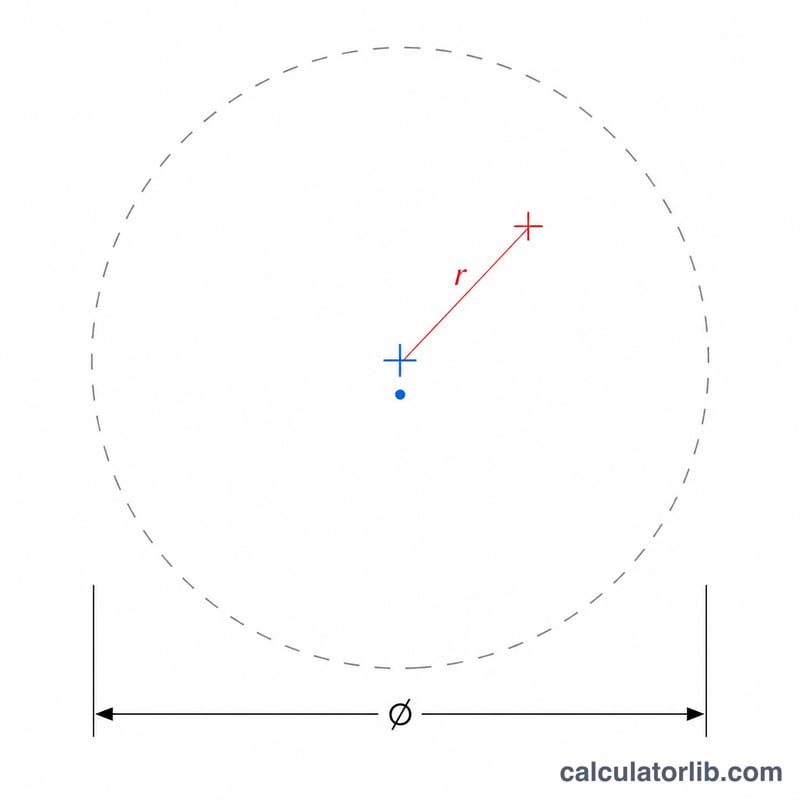
Vị trí thực là một dạng kiểm soát trong hệ thống Dung sai hình học (GD&T — Geometric Dimensioning and Tolerancing), quy định mức độ tâm thực tế của một bề mặt được phép lệch khỏi vị trí lý thuyết chính xác (danh nghĩa). Vì vùng dung sai là một hình tròn (trong không gian 2D) lấy điểm danh nghĩa làm tâm, nên vị trí thực được biểu thị theo đường kính — đó cũng là lý do sai lệch bán kính phải nhân đôi.
Cách sử dụng công cụ
Nhập tọa độ X và Y danh nghĩa (lý thuyết chính xác) của bề mặt, sau đó nhập tọa độ X và Y đo được từ kết quả kiểm tra của bạn (máy CMM, máy chiếu biên dạng, v.v.). Công cụ sẽ trả về giá trị vị trí thực (đường kính vùng dung sai cần thiết để bao trọn bề mặt) cùng với các sai lệch theo X, theo Y và sai lệch bán kính. Hãy dùng nhất quán một đơn vị xuyên suốt — milimét hoặc inch.
Giải thích công thức
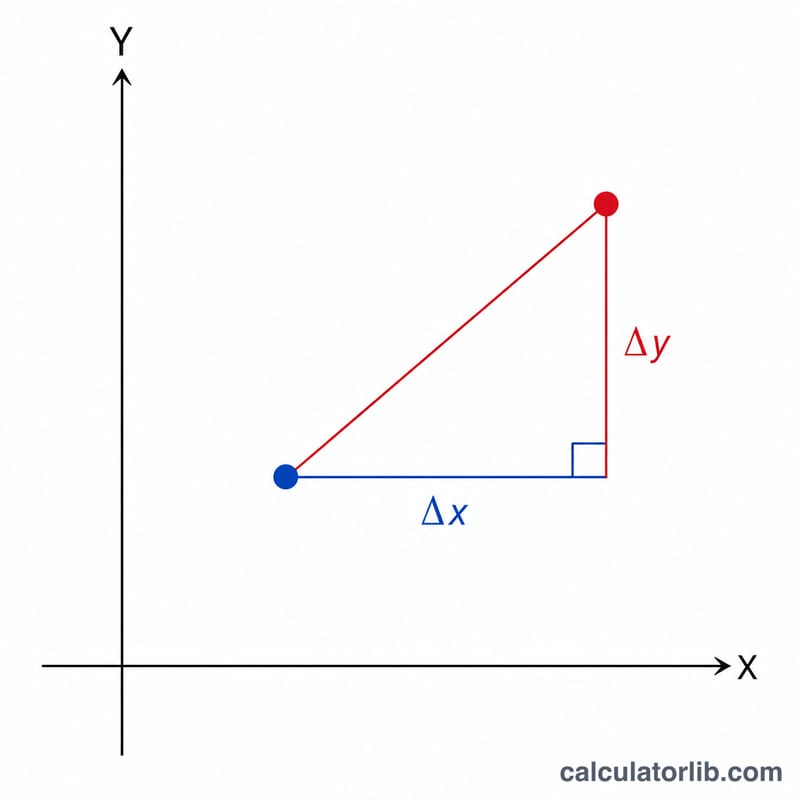
Trước tiên hãy tìm các sai lệch: \(\Delta X = X_{\text{đo được}} - X_{\text{danh nghĩa}}\) và \(\Delta Y = Y_{\text{đo được}} - Y_{\text{danh nghĩa}}\). Sai lệch bán kính là \(r = \sqrt{\Delta X^2 + \Delta Y^2}\), tức khoảng cách thực tế so với vị trí đúng. Vị trí thực được tính bằng
$$\text{TP} = 2\sqrt{(\Delta x)^2 + (\Delta y)^2}$$ $$\text{trong đó}\quad \left\{ \begin{aligned} \Delta x &= \text{X Measured} - \text{X Nominal} \\ \Delta y &= \text{Y Measured} - \text{Y Nominal} \end{aligned} \right.$$tức \(\text{TP} = 2 \times r\), bởi vùng dung sai dạng trụ (hình tròn) được quy định theo đường kính chứ không phải bán kính.
Ví dụ minh họa
Một lỗ có vị trí danh nghĩa tại (10, 10) mm và được đo tại (10,3, 10,4) mm. \(\Delta X = 0{,}3\), \(\Delta Y = 0{,}4\), nên \(r = \sqrt{0{,}09 + 0{,}16} = \sqrt{0{,}25} = 0{,}5\) mm. Vị trí thực \(= 2 \times 0{,}5 =\) 1,0 mm. Bề mặt này chỉ đạt yêu cầu nếu dung sai vị trí trên bản vẽ là 1,0 mm trở lên (chưa tính phần dung sai thưởng bonus tolerance).
Câu hỏi thường gặp
Vì sao phải nhân với 2? Vùng dung sai vị trí là một hình tròn/hình trụ được xác định theo đường kính. Điểm đo nằm đâu đó trong hình tròn này tại bán kính \(r\), nên đường kính cần thiết bằng \(2r\).
Có bao gồm dung sai thưởng (bonus tolerance) không? Không. Công cụ chỉ tính sai lệch vị trí cơ bản. Phần dung sai thưởng từ các điều kiện MMC/LMC phải được cộng riêng vào dung sai cho phép của bạn.
Nên dùng đơn vị nào? Bất kỳ đơn vị nào, miễn nhất quán. Nếu tọa độ danh nghĩa và đo được tính bằng milimét thì kết quả là milimét; nếu tính bằng inch thì kết quả là inch.