位置度(True Position)とは
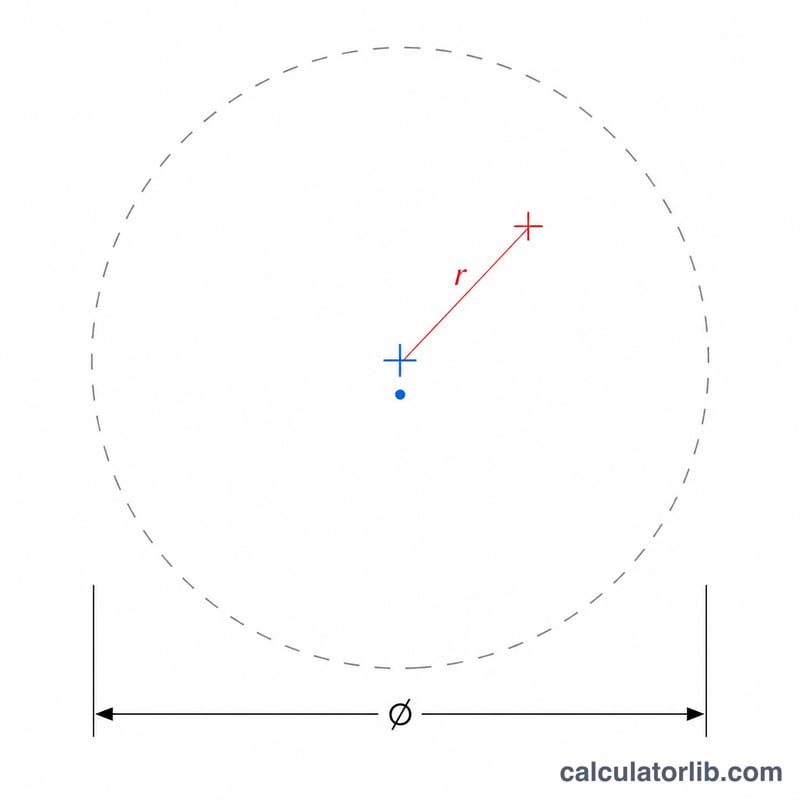
位置度は幾何公差(GD&T:Geometric Dimensioning and Tolerancing)の一種で、フィーチャ(穴や軸など)の実際の中心が、理論的に正しい位置(基準位置)からどれだけずれてよいかを規定する管理項目です。公差域は基準点を中心とした円(2次元の場合)になるため、位置度は直径で表します。半径方向のずれを2倍するのはこのためです。
この計算ツールの使い方
まず、フィーチャの理論的に正しい基準X・Y座標を入力します。次に、三次元測定機(CMM)や光学式コンパレータなどの検査で得た実測X・Y座標を入力してください。本ツールは、フィーチャを含むのに必要な公差域の直径=位置度の値と、X方向・Y方向・半径方向それぞれのずれを返します。単位はミリメートルまたはインチのいずれかに統一してください。
計算式の解説
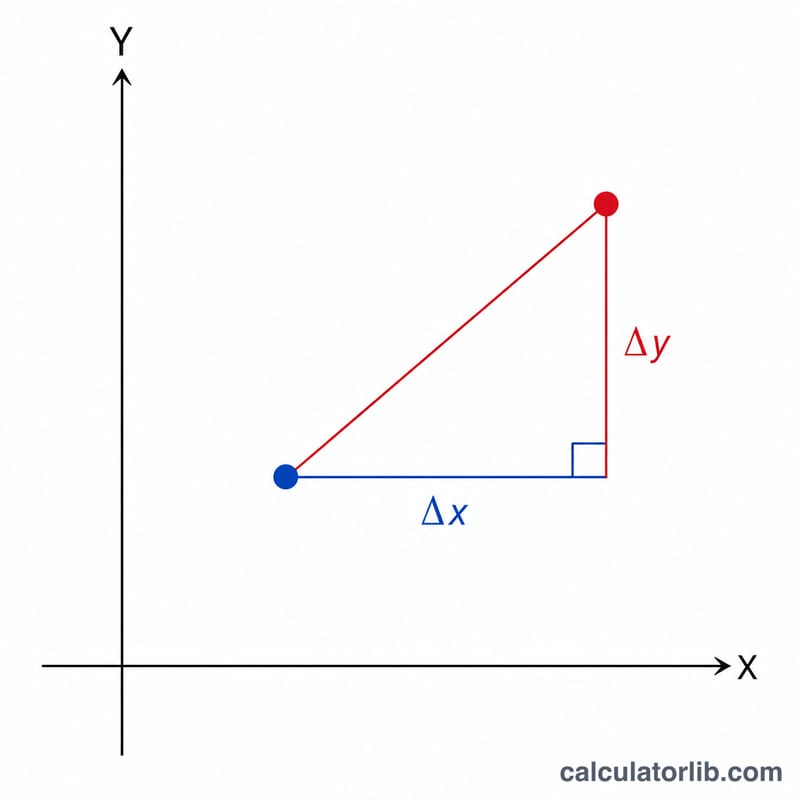
まず各方向のずれを求めます。\(\Delta X = X_\text{実測} - X_\text{基準}\)、\(\Delta Y = Y_\text{実測} - Y_\text{基準}\) です。半径方向のずれは $$r = \sqrt{(\Delta X)^2 + (\Delta Y)^2}$$ で、これが正しい位置からの実際の距離になります。位置度は $$\text{TP} = 2 \times r$$ で求めます。円筒状(円形)の公差域は半径ではなく直径で指定されるため、2倍するわけです。
計算例
ある穴の基準位置が (10, 10) mm、実測値が (10.3, 10.4) mm だとします。\(\Delta X = 0.3\)、\(\Delta Y = 0.4\) なので、$$r = \sqrt{0.09 + 0.16} = \sqrt{0.25} = 0.5 \text{ mm}$$ 位置度 $$= 2 \times 0.5 = \mathbf{1.0 \text{ mm}}$$ となります。このフィーチャが合格となるのは、図面で指定された位置公差が 1.0 mm 以上である場合のみです(ボーナス公差を加味する前の判定)。
よくある質問(FAQ)
なぜ2倍するのですか? 位置公差域は直径で定義された円(円筒)だからです。実測点はその円の中で半径 \(r\) の位置にあるため、必要な直径は \(2r\) になります。
ボーナス公差は含まれますか? いいえ。本ツールが計算するのは基本的な位置偏差のみです。MMC(最大実体公差)/LMC(最小実体公差)の記号によるボーナス公差は、許容公差に別途加算してください。
単位は何を使えばよいですか? 統一されていれば任意の単位で構いません。基準値と実測値をミリメートルで入力すれば結果もミリメートル、インチで入力すれば結果もインチで表示されます。