这个计算器能做什么
本工具用于计算任意 2×2 矩阵 [[a, b], [c, d]] 的特征值。特征值刻画了一个线性变换如何沿其特征方向对空间进行拉伸、压缩或旋转。它在线性代数、物理学、微分方程、动力系统以及机器学习(例如主成分分析 PCA)中都有广泛应用。
如何使用
依次输入矩阵的四个元素:第一行填 a 和 b,第二行填 c 和 d。计算器会同时返回两个特征值。当判别式为负时,两个特征值构成一对复共轭数,以 \(x \pm yi\) 的形式显示。
公式详解
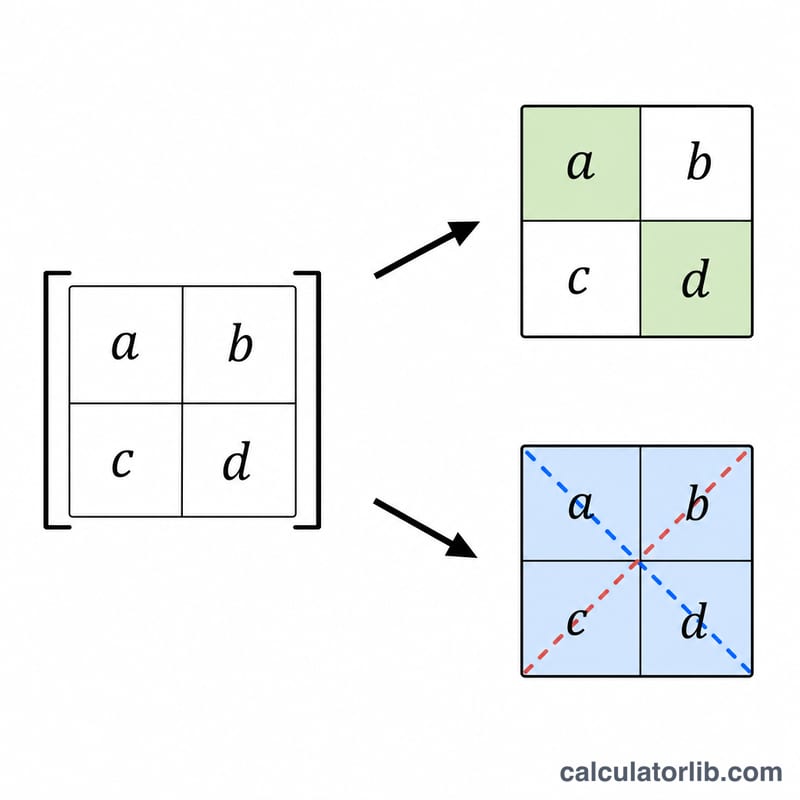
对于矩阵 [[a, b], [c, d]],特征值就是特征多项式 \(\lambda^2 - (\text{tr})\lambda + \det = 0\) 的根,其中迹 \(\text{tr} = a + d\),行列式 \(\det = ad - bc\)。用求根公式求解可得:
$$\lambda = \frac{\text{tr} \pm \sqrt{\text{tr}^2 - 4\cdot\det}}{2}$$
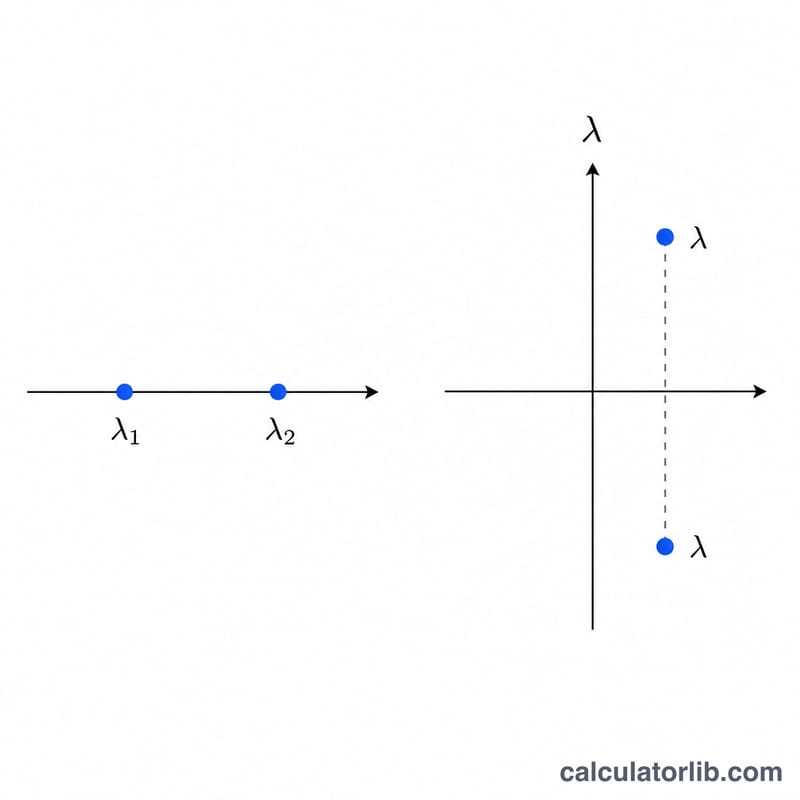
根号下的量 \(\Delta = \text{tr}^2 - 4\cdot\det\) 称为判别式。若 \(\Delta \geq 0\),特征值为实数;若 \(\Delta < 0\),则特征值为复共轭数,其实部为 \(\text{tr}/2\),虚部为 \(\pm\sqrt{-\Delta}/2\)。
实例演算
以矩阵 [[2, 1], [1, 2]] 为例。这里 \(\text{tr} = 2 + 2 = 4\),\(\det = (2)(2) - (1)(1) = 3\)。判别式为 \(4^2 - 4\cdot 3 = 16 - 12 = 4\),因此 \(\sqrt{4} = 2\)。两个特征值分别是 \((4 + 2)/2 = 3\) 和 \((4 - 2)/2 = 1\)。
解释特征值
每个特征值描述线性映射 \(A\) 沿其对应特征向量方向的作用。特征值的符号和类型告诉你关于缩放、方向,以及当 \(A\) 是线性动力系统 \(\dot{\mathbf{x}}=A\mathbf{x}\) 的矩阵时,关于长期稳定性的信息。
实特征值
- 正值 (\(\lambda>0\)):映射沿该特征向量拉伸(扩大)向量;在动力系统中,该分量随时间增长。
- 负值 (\(\lambda<0\)):映射沿该方向反射和/或收缩;在动力系统中,该分量衰减到原点。
- \(|\lambda|>1\) 对比 \(|\lambda|<1\):对于重复的迭代映射(\(\mathbf{x}_{n+1}=A\mathbf{x}_n\)),大于 1 的幅值表示沿该轴扩展,小于 1 表示收缩。
- \(\lambda=0\):矩阵是奇异的(\(\Delta=0\));它将该方向折叠到一个点,\(A^{-1}\) 不存在。
复共轭对
当 \(D<0\) 时,特征值为 \(\lambda=\alpha\pm\beta i\)。虚部 \(\beta\) 引入旋转:轨迹螺旋形或圆形运动,而不是直线进出。实部 \(\alpha=\tfrac{\tau}{2}\) 决定螺旋是增长(\(\alpha>0\))、衰减(\(\alpha<0\))还是形成闭合轨道(\(\alpha=0\))。
重复特征值(简并性)
当 \(D=0\) 时,存在单个特征值 \(\lambda=\tfrac{\tau}{2}\)。如果它仍有两个独立特征向量,矩阵是纯缩放;如果只有一个,矩阵是缺陷的,动力学包括剪切(不适当或简并节点)。
稳定性分类(迹-行列式)
对于系统 \(\dot{\mathbf{x}}=A\mathbf{x}\),原点处的平衡由 \(\tau\)、\(\Delta\) 和 \(D=\tau^2-4\Delta\) 分类:
| 条件 | 特征值类型 | 分类 |
|---|---|---|
| \(\Delta<0\) | 实数,符号相反 | 鞍点(不稳定) |
| \(\Delta>0,\ \tau<0,\ D\ge 0\) | 实数,均为负 | 稳定节点 |
| \(\Delta>0,\ \tau>0,\ D\ge 0\) | 实数,均为正 | 不稳定节点 |
| \(\Delta>0,\ \tau<0,\ D<0\) | 复数,负实部 | 稳定螺旋 |
| \(\Delta>0,\ \tau>0,\ D<0\) | 复数,正实部 | 不稳定螺旋 |
| \(\Delta>0,\ \tau=0\) | 纯虚数 \(\pm\beta i\) | 中心(中性稳定) |
简而言之:行列式必须为正以形成节点或螺旋,迹的符号决定稳定性(负值 = 稳定,正值 = 不稳定),判别式决定节点(\(D\ge0\))对比螺旋(\(D<0\))。负行列式总是给出鞍点,无论迹如何。
这是供教育用途的一般数学信息,不是专业工程或财务建议;在依赖结果之前,请根据你的具体模型验证结果。
常见问题
如果特征值是复数怎么办? 像 [[0, −1], [1, 0]] 这样的旋转矩阵,迹为 0,行列式为 1,于是 \(\Delta = -4\)。其特征值为 \(\pm i\),显示为 \(0 + 1i\) 和 \(0 - 1i\)。
特征值可以相等吗? 可以。当判别式恰好等于零时,矩阵存在一个重根(退化)特征值,即 \(\lambda = \text{tr}/2\)。
行列式能告诉我什么? 两个特征值的乘积等于行列式,它们的和等于迹——这是验证计算结果是否正确的便捷方法。