What This Calculator Does
This tool computes the eigenvalues of any 2×2 matrix written as [[a, b], [c, d]]. Eigenvalues describe how a linear transformation stretches, shrinks, or rotates space along its characteristic directions. They appear throughout linear algebra, physics, differential equations, dynamical systems, and machine learning (for example in principal component analysis).
How to Use It
Enter the four entries of your matrix: a and b for the first row, c and d for the second row. The calculator returns both eigenvalues. When the discriminant is negative, the eigenvalues form a complex conjugate pair and are displayed in the form x ± yi.
The Formula Explained
For a matrix [[a, b], [c, d]] the eigenvalues are the roots of the characteristic polynomial \(\lambda^2 - (\text{tr})\lambda + \det = 0\), where the trace \(\text{tr} = a + d\) and the determinant \(\det = ad - bc\). Solving with the quadratic formula gives:
$$\lambda = \frac{\text{tr} \pm \sqrt{\text{tr}^2 - 4\cdot\det}}{2}$$
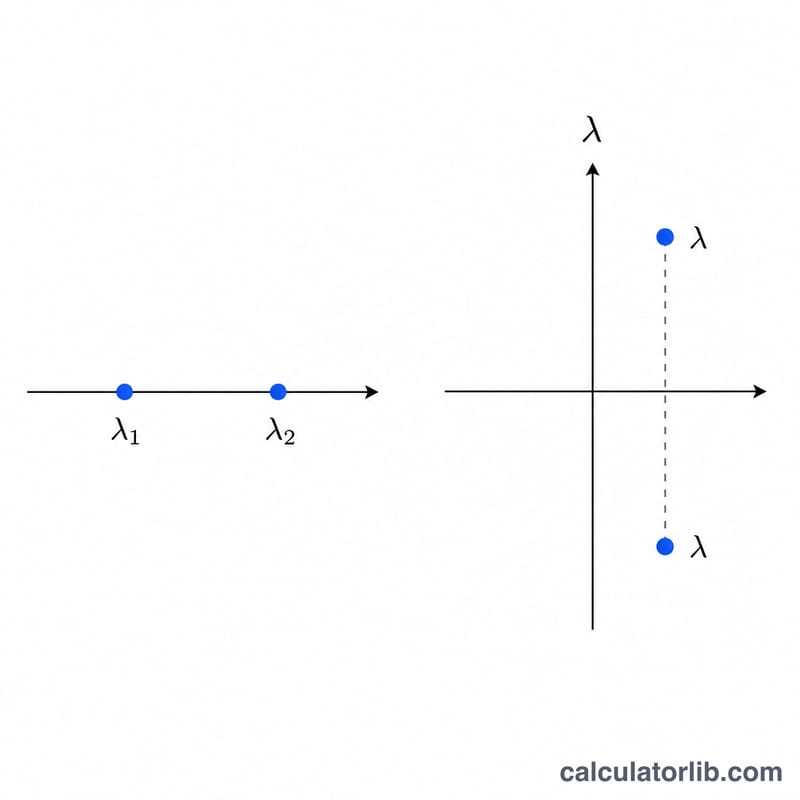
The quantity under the root, \(\Delta = \text{tr}^2 - 4\cdot\det\), is the discriminant. If \(\Delta \geq 0\) the eigenvalues are real; if \(\Delta < 0\) they are complex conjugates with real part \(\text{tr}/2\) and imaginary part \(\pm\sqrt{-\Delta}/2\).
Worked Example
Take the matrix [[2, 1], [1, 2]]. Here \(\text{tr} = 2 + 2 = 4\) and \(\det = (2)(2) - (1)(1) = 3\). The discriminant is $$4^2 - 4\cdot 3 = 16 - 12 = 4,$$ so \(\sqrt{4} = 2\). The eigenvalues are \((4 + 2)/2 = 3\) and \((4 - 2)/2 = 1\).
Interpreting Your Eigenvalues
Each eigenvalue describes how the linear map \(A\) acts along its corresponding eigenvector direction. The sign and type of the eigenvalues tell you about scaling, orientation, and—when \(A\) is the matrix of a linear dynamical system \(\dot{\mathbf{x}}=A\mathbf{x}\)—about long-term stability.
Real eigenvalues
- Positive (\(\lambda>0\)): the map stretches (expands) vectors along that eigenvector; in a dynamical system the component grows over time.
- Negative (\(\lambda<0\)): the map reflects and/or contracts along that direction; in a dynamical system the component decays toward the origin.
- \(|\lambda|>1\) vs \(|\lambda|<1\): for repeated iterated maps (\(\mathbf{x}_{n+1}=A\mathbf{x}_n\)), magnitude greater than 1 means expansion and less than 1 means contraction along that axis.
- \(\lambda=0\): the matrix is singular (\(\Delta=0\)); it collapses that direction to a point, and \(A^{-1}\) does not exist.
Complex conjugate pair
When \(D<0\) the eigenvalues are \(\lambda=\alpha\pm\beta i\). The imaginary part \(\beta\) introduces rotation: trajectories spiral or circle rather than moving straight in or out. The real part \(\alpha=\tfrac{\tau}{2}\) sets whether the spiral grows (\(\alpha>0\)), decays (\(\alpha<0\)), or forms closed orbits (\(\alpha=0\)).
Repeated eigenvalue (degeneracy)
When \(D=0\) there is a single eigenvalue \(\lambda=\tfrac{\tau}{2}\). If it still has two independent eigenvectors the matrix is a pure scaling; if it has only one, the matrix is defective and the dynamics include a shear (an improper or degenerate node).
Stability classification (trace–determinant)
For the system \(\dot{\mathbf{x}}=A\mathbf{x}\), the equilibrium at the origin is classified by \(\tau\), \(\Delta\), and \(D=\tau^2-4\Delta\):
| Conditions | Eigenvalue type | Classification |
|---|---|---|
| \(\Delta<0\) | Real, opposite signs | Saddle (unstable) |
| \(\Delta>0,\ \tau<0,\ D\ge 0\) | Real, both negative | Stable node |
| \(\Delta>0,\ \tau>0,\ D\ge 0\) | Real, both positive | Unstable node |
| \(\Delta>0,\ \tau<0,\ D<0\) | Complex, negative real part | Stable spiral |
| \(\Delta>0,\ \tau>0,\ D<0\) | Complex, positive real part | Unstable spiral |
| \(\Delta>0,\ \tau=0\) | Pure imaginary \(\pm\beta i\) | Center (neutrally stable) |
In short: the determinant must be positive for a node or spiral, the trace sign sets stability (negative = stable, positive = unstable), and the discriminant decides node (\(D\ge0\)) versus spiral (\(D<0\)). A negative determinant always gives a saddle regardless of trace.
This is general mathematical information for educational use, not professional engineering or financial advice; verify results against your specific model before relying on them.
FAQ
What if my eigenvalues are complex? A rotation matrix like [[0, −1], [1, 0]] has trace 0 and determinant 1, giving \(\Delta = -4\). The eigenvalues are \(\pm i\), shown as 0 + 1i and 0 − 1i.
Can eigenvalues be equal? Yes. When the discriminant is exactly zero the matrix has a repeated (degenerate) eigenvalue, \(\lambda = \text{tr}/2\).
What does the determinant tell me? The product of the eigenvalues equals the determinant, and their sum equals the trace — a handy way to verify your answer.