What this calculator does
The 3×3 Matrix Eigenvalue Calculator finds the three eigenvalues of any real 3×3 matrix. Eigenvalues are the special scalars λ for which there exists a non-zero vector v with \(Av = \lambda v\). They reveal how a linear transformation stretches space along its characteristic directions and appear throughout physics, engineering, statistics (PCA), and stability analysis.
How to use it
Enter the nine entries of your matrix A in their grid positions (a₁₁ to a₃₃), then submit. The calculator builds the characteristic polynomial \(\det(A - \lambda I) = 0\) and solves the resulting cubic, returning the eigenvalues sorted from largest to smallest along with the trace and determinant as a built-in sanity check.
The formula explained
For a 3×3 matrix, the characteristic equation expands to a cubic:
$$\det(A - \lambda I) = -\lambda^3 + \operatorname{tr}(A)\,\lambda^2 - m\,\lambda + \det(A) = 0$$where \(\operatorname{tr}(A)\) is the sum of the diagonal entries and \(m\) is the sum of the three principal 2×2 minors. Multiplying by −1 gives a monic cubic that is solved exactly using Cardano's / the trigonometric method. Two useful identities verify the answer: the eigenvalues sum to the trace and multiply to the determinant.
$$\sum \lambda_i = \operatorname{tr}(A), \qquad \prod \lambda_i = \det(A)$$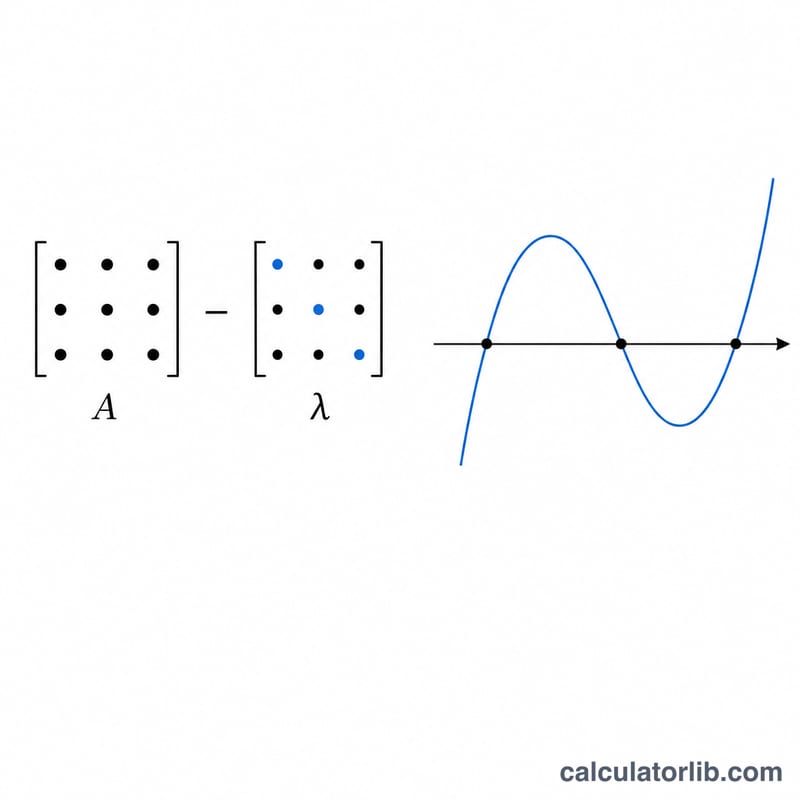
Worked example
Take the symmetric matrix with rows [2,0,0], [0,3,4], [0,4,9]. The trace is 14 and the determinant is
$$2\cdot(27-16)=22$$The block in the lower-right corner [[3,4],[4,9]] has eigenvalues 11 and 1, and the isolated 2 gives the third. So the eigenvalues are 11, 2 and 1 — exactly what the calculator returns.
Interpreting Your Eigenvalues
Eigenvalues describe how the matrix stretches, compresses, flips, or rotates space along its characteristic directions. Their signs and structure carry direct meaning.
- All eigenvalues positive (>0): the matrix is positive-definite (for symmetric \(A\)). It stretches every direction outward; quadratic forms \(x^\top A x\) are always positive. This is the condition for a strict local minimum in optimization and for a valid covariance matrix.
- All eigenvalues negative (<0): negative-definite — every direction is compressed/reflected. In dynamical systems this means an asymptotically stable equilibrium.
- Mixed signs: the matrix is indefinite — a saddle. Some directions expand, others contract.
- An eigenvalue equal to 0: the matrix is singular (non-invertible) and \(\det(A)=0\). It collapses at least one direction onto the origin; the null space is the corresponding eigenspace.
Repeated and complex roots
- Repeated (degenerate) eigenvalues: compare algebraic and geometric multiplicity. If a repeated eigenvalue still has enough independent eigenvectors (geometric = algebraic multiplicity) the matrix is diagonalizable; if it has too few it is defective and needs a Jordan form.
- Complex conjugate pair \(a\pm bi\): a real 3×3 matrix always has at least one real eigenvalue, so complex roots appear as a single conjugate pair plus one real value. The pair indicates a rotation-with-scaling in a 2D invariant plane; the modulus \(\sqrt{a^2+b^2}\) sets the growth/decay rate and the argument sets the rotation angle.
Domain meaning
In stability analysis, eigenvalues of a system's Jacobian determine equilibrium behavior: negative real parts → stable, any positive real part → unstable, purely imaginary → oscillation. In Principal Component Analysis (PCA), the eigenvalues of the covariance matrix equal the variance captured along each principal direction (eigenvector); the largest eigenvalue marks the axis of greatest spread, and the ratio of each eigenvalue to their sum is the fraction of total variance explained.
Key Terms
- Eigenvalue (\(\lambda\))
- A scalar such that \(A\mathbf{v}=\lambda\mathbf{v}\) for some nonzero vector \(\mathbf{v}\); it is the factor by which the matrix scales that direction.
- Eigenvector (\(\mathbf{v}\))
- A nonzero vector whose direction is unchanged (only scaled) when multiplied by the matrix; it spans the eigenspace of its eigenvalue.
- Characteristic polynomial
- The polynomial \(\det(A-\lambda I)\); for a 3×3 matrix it is the cubic \(\lambda^3-\operatorname{tr}(A)\lambda^2+m\lambda-\det(A)\), whose roots are the eigenvalues.
- Trace, \(\operatorname{tr}(A)\)
- The sum of the diagonal entries \(a_{11}+a_{22}+a_{33}\); it equals the sum of the eigenvalues.
- Determinant, \(\det(A)\)
- A scalar measuring the volume scaling of the transformation; it equals the product of the eigenvalues. Zero determinant means a singular matrix.
- Principal 2×2 minor (\(m\))
- The sum of the three 2×2 determinants left after deleting one matching row and column; it is the coefficient of \(\lambda\) in the characteristic cubic and equals the sum of pairwise products of the eigenvalues.
- Algebraic multiplicity
- The number of times an eigenvalue appears as a root of the characteristic polynomial.
- Geometric multiplicity
- The number of linearly independent eigenvectors for an eigenvalue (the dimension of its eigenspace). It never exceeds the algebraic multiplicity; equality for every eigenvalue means the matrix is diagonalizable.
- Complex conjugate eigenvalues
- A pair \(a+bi\) and \(a-bi\) that arises for real matrices; they signal a rotational component in an invariant plane.
- Identity matrix (\(I\))
- The square matrix with 1s on the diagonal and 0s elsewhere; \(\lambda I\) is subtracted from \(A\) to form \(A-\lambda I\).
FAQ
Does it handle complex eigenvalues? Non-symmetric matrices can have complex conjugate eigenvalues. This tool reports the real root exactly and the real parts of any complex pair. Symmetric matrices always have three real eigenvalues.
What is the trace used for? It equals the sum of all eigenvalues, a quick way to confirm the result.
Are repeated eigenvalues supported? Yes — a repeated root simply appears more than once in the list.