
Qu'est-ce que le coefficient d'amortissement ?
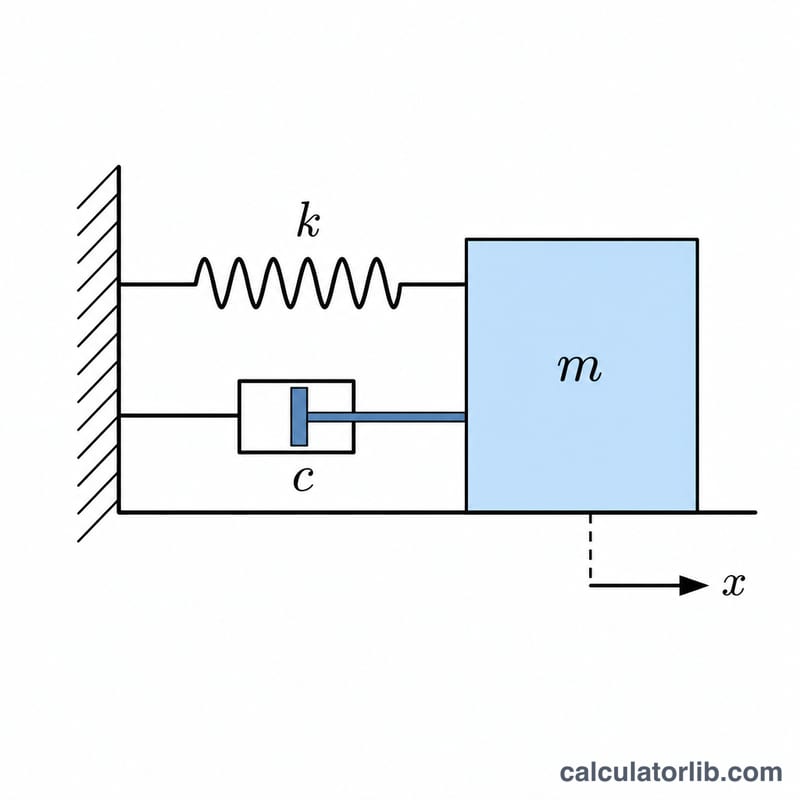
Le coefficient d'amortissement (\(\zeta\), prononcé « zêta ») est un nombre sans dimension qui décrit la façon dont les oscillations d'un système mécanique ou électrique s'atténuent après une perturbation. Pour un système masse-ressort-amortisseur à un seul degré de liberté, il compare la constante d'amortissement réelle c à la constante d'amortissement critique. C'est l'un des paramètres les plus importants en analyse vibratoire, en automatique (théorie des systèmes asservis) et en génie des structures.
Comment utiliser ce calculateur
Saisissez la constante d'amortissement c (N·s/m), la raideur du ressort k (N/m) et la masse m (kg). Le calculateur renvoie le coefficient d'amortissement \(\zeta\), la constante d'amortissement critique, la pulsation propre non amortie, et vous indique si le système est sous-amorti, à amortissement critique ou suramorti.
La formule expliquée
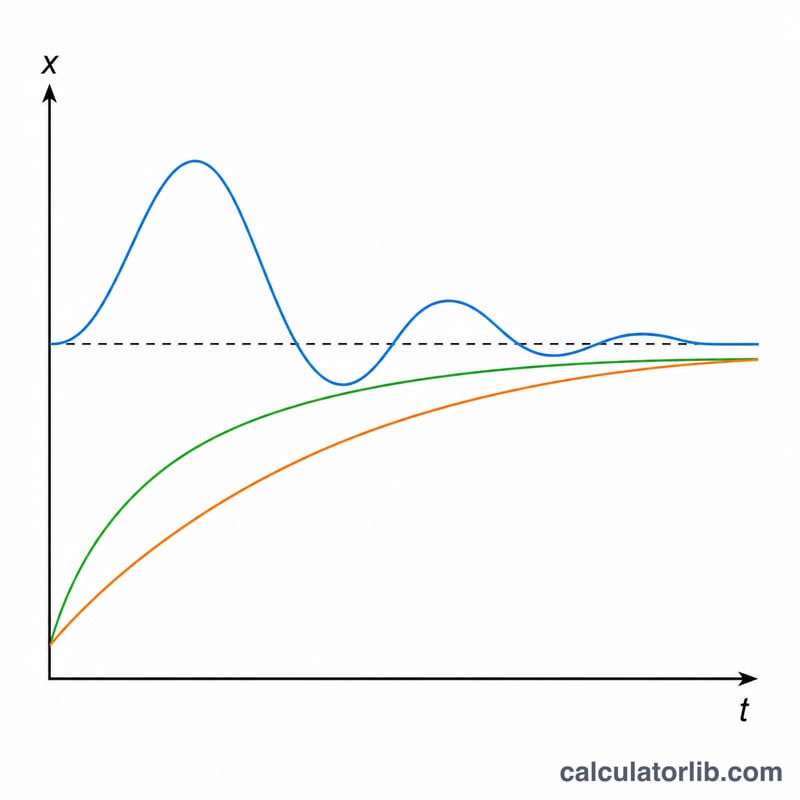
Le coefficient d'amortissement se calcule par $$\zeta = \frac{\text{Amortissement } c}{2\sqrt{\text{Raideur } k \cdot \text{Masse } m}}$$ Le dénominateur, \(2\sqrt{k \cdot m}\), correspond à la constante d'amortissement critique cᶜ — la plus faible quantité d'amortissement qui empêche toute oscillation. Lorsque \(\zeta < 1\), le système oscille en s'atténuant (sous-amorti) ; lorsque \(\zeta = 1\), il revient à l'équilibre le plus rapidement possible sans osciller (amortissement critique) ; et lorsque \(\zeta > 1\), il y revient lentement sans osciller (suramorti).
Exemple concret
Supposons c = 20 N·s/m, k = 100 N/m et m = 10 kg. On calcule d'abord \(k \cdot m = 1000\), puis \(\sqrt{1000} \approx 31{,}6228\) ; la constante d'amortissement critique vaut donc \(2 \times 31{,}6228 \approx 63{,}2456\) N·s/m. Le coefficient d'amortissement est $$\zeta = \frac{20}{63{,}2456} \approx 0{,}3162$$ soit une valeur inférieure à 1 : le système est sous-amorti et oscillera avant de se stabiliser.
FAQ
Que signifie un coefficient d'amortissement égal à 1 ? Cela signifie que le système est à amortissement critique : il revient au repos dans le temps le plus court possible, sans dépassement.
Un coefficient d'amortissement plus élevé est-il toujours préférable ? Pas nécessairement. Un amortissement très élevé (suramorti) rend le système lent et mou. De nombreux systèmes asservis visent \(\zeta \approx 0{,}7\) pour obtenir une réponse rapide avec un dépassement minimal.
Le coefficient d'amortissement peut-il être négatif ? Un \(\zeta\) négatif indique un système instable, dont les oscillations s'amplifient au fil du temps. Ce calculateur suppose des valeurs physiques positives.