À quoi sert ce calculateur
Cet outil résout un système de n équations linéaires à n inconnues, que l'on écrit de façon compacte sous la forme \(\mathbf{A}\cdot\mathbf{x} = \mathbf{b}\), où A est une matrice de coefficients n\(\times\)n, x le vecteur des inconnues et b le vecteur des constantes. Il renvoie l'unique vecteur solution x ainsi que le déterminant de A. La méthode relève de l'algèbre linéaire pure et fonctionne strictement de la même manière partout : aucune dépendance à un pays ou à une unité de mesure, chaque coefficient n'est qu'un nombre réel.
Mode d'emploi
Fixez n (le nombre d'équations et d'inconnues). Saisissez la matrice des coefficients A à raison d'une ligne par rangée, les nombres étant séparés par des espaces ou des virgules, puis entrez le vecteur des constantes b sous forme d'une liste de longueur n. Choisissez une précision d'affichage, puis lancez le calcul. Les valeurs négatives, décimales et à virgule sont toutes acceptées. Si A possède bien autant de lignes et de colonnes que n et que b a la bonne longueur, vous obtenez la solution ; sinon, l'outil signale une incohérence de dimensions.
La méthode expliquée
Le solveur effectue une élimination de Gauss avec pivot partiel, ce qui équivaut mathématiquement à la décomposition LU PA = LU. Pour chaque colonne, il sélectionne le pivot disponible de plus grande valeur absolue afin de préserver la stabilité numérique des calculs, élimine les éléments situés sous le pivot, puis remonte par substitution arrière depuis la dernière inconnue. Si un pivot est pratiquement nul, le déterminant vaut zéro, la matrice est singulière et le système n'admet pas de solution unique : l'outil le signale au lieu de diviser par zéro.
$$\begin{gathered} \mathbf{A}\,\mathbf{x} = \mathbf{b}, \qquad \mathbf{A} = \mathbf{L}\mathbf{U} \\[1.5em] \text{solve}\quad \left\{ \begin{aligned} \mathbf{L}\mathbf{y} &= \mathbf{b} \quad(\text{forward}) \\ \mathbf{U}\mathbf{x} &= \mathbf{y} \quad(\text{back substitution}) \end{aligned} \right. \end{gathered}$$Le déterminant s'obtient à partir des pivots :
$$\det(\mathbf{A}) = (-1)^{s}\prod_{k=1}^{n} u_{kk}$$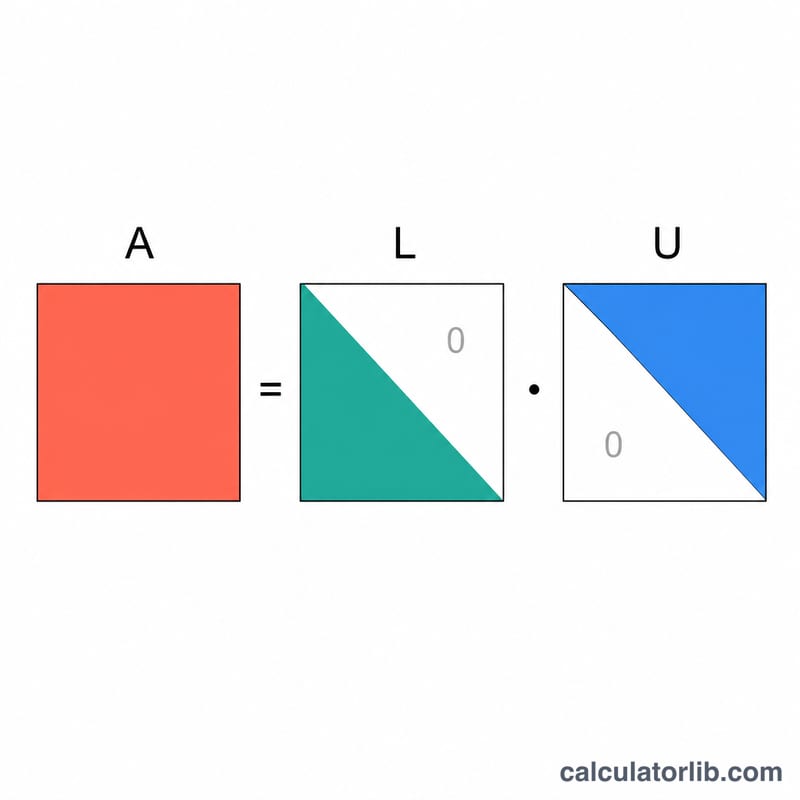
Exemple résolu
Prenons \(2x + y - z = 8\), \(-3x - y + 2z = -11\), \(-2x + y + 2z = -3\). On a donc \(\mathbf{A} = [[2,1,-1],[-3,-1,2],[-2,1,2]]\) et \(\mathbf{b} = [8,-11,-3]\). L'élimination donne \(x = 2\), \(y = 3\), \(z = -1\). Vérification avec la première équation :
$$2(2) + 3 - (-1) = 4 + 3 + 1 = 8$$Exact.
FAQ
Que se passe-t-il si le déterminant est nul ? La matrice est singulière : les équations sont liées ou incompatibles ; il n'existe pas de solution unique, et le calculateur signale alors une matrice singulière.
Pourquoi un pivot partiel ? Choisir le plus grand pivot évite d'amplifier les erreurs d'arrondi et garantit des résultats précis, même pour des matrices délicates.
La solution peut-elle être non entière ? Oui. Les solutions sont calculées en virgule flottante et peuvent être décimales ; le réglage de précision d'affichage détermine le nombre de chiffres significatifs présentés.