Qué hace esta calculadora
Esta herramienta resuelve un sistema de n ecuaciones lineales con n incógnitas, que se escribe de forma compacta como \(\mathbf{A}\cdot\mathbf{x} = \mathbf{b}\), donde A es una matriz de coeficientes de n×n, x es el vector de incógnitas y b es el vector de constantes. Devuelve el vector solución único x junto con el determinante de A. El método es álgebra lineal pura y funciona exactamente igual en cualquier lugar: no depende del país ni de las unidades, ya que cada valor introducido no es más que un número real.
Cómo usarla
Define \(n\) (el número de ecuaciones e incógnitas). Escribe la matriz de coeficientes A con una fila por línea, separando los números con espacios o comas, y luego introduce el vector de constantes b como una lista de longitud n. Elige la precisión de visualización y resuelve. Se admiten números negativos y decimales sin problema. Si A tiene el mismo número de filas y columnas que n y b coincide con esa longitud, obtendrás la solución; en caso contrario, la herramienta te avisará de que las dimensiones no concuerdan.
El método explicado
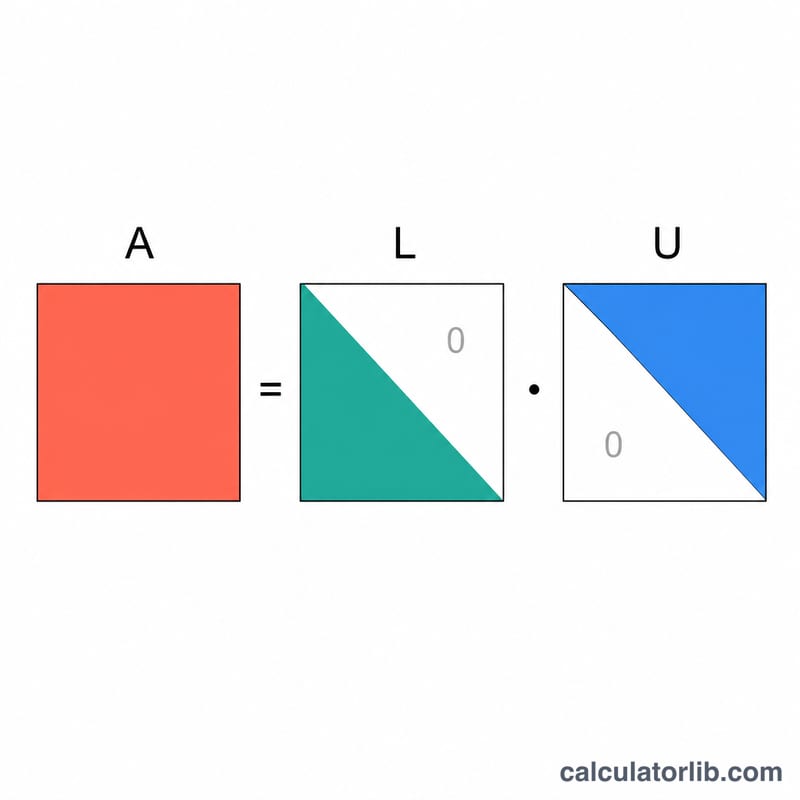
La calculadora aplica la eliminación de Gauss con pivoteo parcial, que matemáticamente equivale a la descomposición LU PA = LU. En cada columna selecciona el pivote disponible de mayor magnitud para mantener la estabilidad numérica de los cálculos, elimina los elementos por debajo del pivote y después realiza la sustitución hacia atrás, desde la última incógnita hacia arriba. Si un pivote es prácticamente cero, el determinante vale cero, la matriz es singular y el sistema no tiene solución única: la herramienta lo indica en lugar de dividir entre cero.
$$\begin{gathered} \mathbf{A}\,\mathbf{x} = \mathbf{b}, \qquad \mathbf{A} = \mathbf{L}\mathbf{U} \\[1.5em] \text{solve}\quad \left\{ \begin{aligned} \mathbf{L}\mathbf{y} &= \mathbf{b} \quad(\text{forward}) \\ \mathbf{U}\mathbf{x} &= \mathbf{y} \quad(\text{back substitution}) \end{aligned} \right. \end{gathered}$$
$$\det(\mathbf{A}) = (-1)^{s}\prod_{k=1}^{n} u_{kk}$$
Ejemplo resuelto
Consideremos \(2x + y - z = 8\), \(-3x - y + 2z = -11\), \(-2x + y + 2z = -3\). Por tanto \(\mathbf{A} = \begin{bmatrix} 2 & 1 & -1 \\ -3 & -1 & 2 \\ -2 & 1 & 2 \end{bmatrix}\) y \(\mathbf{b} = \begin{bmatrix} 8 \\ -11 \\ -3 \end{bmatrix}\). La eliminación da como resultado \(x = 2\), \(y = 3\), \(z = -1\). Comprobamos la primera ecuación: $$2(2) + 3 - (-1) = 4 + 3 + 1 = 8.$$ Correcto.
Preguntas frecuentes
¿Qué ocurre si el determinante es cero? La matriz es singular, lo que significa que las ecuaciones son dependientes o incompatibles; no existe una solución única, así que la calculadora indica que la matriz es singular.
¿Por qué pivoteo parcial? Elegir el pivote de mayor magnitud evita amplificar los errores de redondeo, lo que aporta resultados precisos incluso con matrices complicadas.
¿La solución puede no ser entera? Sí. Las soluciones se calculan en coma flotante y pueden ser decimales; el ajuste de precisión de visualización controla cuántas cifras significativas se muestran.