什么是3×3矩阵行列式计算器?
本工具根据矩阵A的9个实数元素,计算其行列式(\(\det A\)),同时给出行列式的倒数(\(1/\det A\))。行列式是一个能判断矩阵是否可逆的单一数值:行列式不为零,说明矩阵存在逆矩阵;行列式为零,则说明该矩阵是奇异矩阵(不可逆)。
使用方法
在带标签的方格中依次填入9个元素,其中a-行-列表示该行该列对应的元素。每个单元格都可以输入任意实数(正数、负数或小数均可)。点击"计算"后,主结果会显示\(\det A\),下方则显示\(1/\det A\)。如果行列式为零,倒数将显示为"未定义"。
公式详解
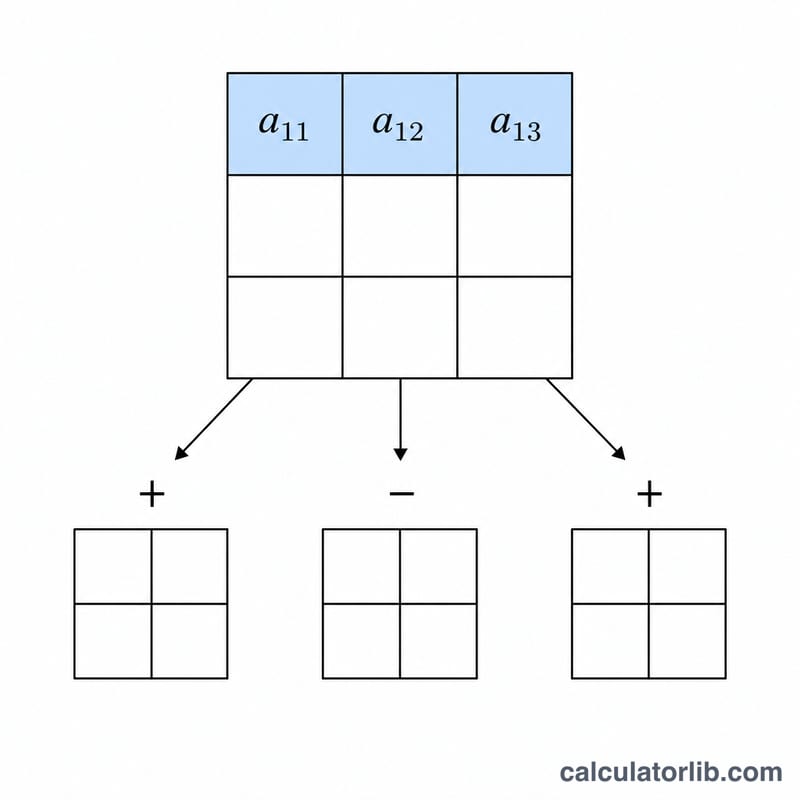
沿第一行进行代数余子式展开(拉普拉斯展开):
$$\det A = a_{11}(a_{22}a_{33} - a_{23}a_{32}) - a_{12}(a_{21}a_{33} - a_{23}a_{31}) + a_{13}(a_{21}a_{32} - a_{22}a_{31})$$
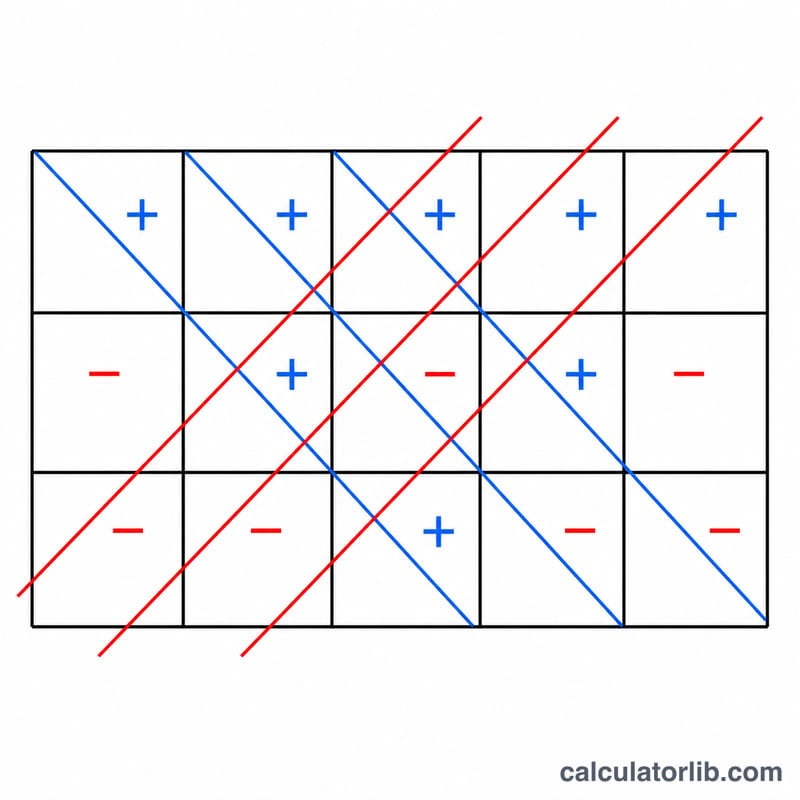
这与萨吕斯法则(rule of Sarrus)是等价的:将三条从左上到右下的对角线乘积相加,再减去三条从右上到左下的对角线乘积。计算结果等于矩阵A所代表的线性变换的"带符号体积缩放因子";若数值为负,则表示该变换会改变方向(翻转定向)。
计算实例
设A = [[1,2,3],[4,5,6],[7,8,10]]:$$\det A = 1(5\times 10 - 6\times 8) - 2(4\times 10 - 6\times 7) + 3(4\times 8 - 5\times 7) = 1(2) - 2(-2) + 3(-3) = 2 + 4 - 9 = -3$$其倒数为\(1/(-3) = -0.3333\ldots\)。由于\(\det A\)不为零,该矩阵可逆。
更多工作示例
每个示例都使用沿第一行的余子式展开:
$$\det A = a_{11}(a_{22}a_{33}-a_{23}a_{32}) - a_{12}(a_{21}a_{33}-a_{23}a_{31}) + a_{13}(a_{21}a_{32}-a_{22}a_{31})$$示例 1 — 奇异矩阵(det = 0)
这里第三行正好是前两行的和,所以矩阵是奇异的。
$$A=\begin{pmatrix}1 & 2 & 3\\ 4 & 5 & 6\\ 5 & 7 & 9\end{pmatrix}$$沿第一行展开:
- \(1\,(5\cdot 9 - 6\cdot 7) = 1\,(45-42) = 3\)
- \(-\,2\,(4\cdot 9 - 6\cdot 5) = -2\,(36-30) = -12\)
- \(+\,3\,(4\cdot 7 - 5\cdot 5) = 3\,(28-25) = 9\)
求和:\(3 - 12 + 9 = \) 0。因为 \(\det A = 0\),矩阵是奇异的,倒数 \(1/\det A\) 是未定义的(不存在逆矩阵)。
示例 2 — 负数和小数项
$$A=\begin{pmatrix}2 & -1 & 0.5\\ -3 & 4 & 1\\ 0 & 2 & -2\end{pmatrix}$$沿第一行展开:
- \(2\,(4\cdot(-2) - 1\cdot 2) = 2\,(-8-2) = 2\,(-10) = -20\)
- \(-\,(-1)\,((-3)\cdot(-2) - 1\cdot 0) = +1\,(6-0) = 6\)
- \(+\,0.5\,((-3)\cdot 2 - 4\cdot 0) = 0.5\,(-6-0) = -3\)
求和:\(-20 + 6 - 3 = \) -17。倒数是 \(1/\det A = -1/17 \approx -0.0588\)。
示例 3 — 上三角矩阵(det = 对角线元素的乘积)
$$A=\begin{pmatrix}3 & 5 & -2\\ 0 & 4 & 7\\ 0 & 0 & 2\end{pmatrix}$$沿第一行展开(注意左下方的零使非对角余子式消失):
- \(3\,(4\cdot 2 - 7\cdot 0) = 3\,(8) = 24\)
- \(-\,5\,(0\cdot 2 - 7\cdot 0) = -5\,(0) = 0\)
- \(+\,(-2)\,(0\cdot 0 - 4\cdot 0) = -2\,(0) = 0\)
求和:\(24 + 0 + 0 = \) 24,等于对角线元素的乘积 \(3\cdot 4\cdot 2 = 24\)。对于任何三角矩阵,行列式就是对角线元素的乘积。
关键术语解释
- 行列式(\(\det A\) 或 \(|A|\))
- 从方阵计算得出的单个标量,表示矩阵是否可逆及其如何缩放体积。对于 3×3 矩阵,通过余子式展开计算得出。
- 余子式(\(M_{ij}\))
- 删除第 \(i\) 行和第 \(j\) 列后得到的较小矩阵的行列式。对于 3×3 矩阵,每个余子式是一个 2×2 行列式。
- 代数余子式(\(C_{ij}\))
- 带符号的余子式:\(C_{ij} = (-1)^{i+j} M_{ij}\)。棋盘符号规律是 \(\begin{smallmatrix}+&-&+\\-&+&-\\+&-&+\end{smallmatrix}\)。
- 拉普拉斯/余子式展开
- 一种通过计算所选行或列中每个元素与其代数余子式的乘积之和来计算行列式的方法:\(\det A = \sum_j a_{ij}C_{ij}\)。选择包含零的行或列可减少计算量。
- 萨吕斯法则
- 仅适用于 3×3 矩阵的快捷方法:添加三个从左到右的对角线乘积,然后减去三个从右到左的对角线乘积。它给出与余子式展开相同的结果。
- 奇异矩阵
- 满足 \(\det A = 0\) 的矩阵;因为行(和列)线性相关,它没有逆矩阵。
- 可逆(非奇异)矩阵
- 满足 \(\det A \neq 0\) 的矩阵;它有唯一逆矩阵 \(A^{-1}\)。
- 伴随矩阵
- 代数余子式矩阵的转置。它出现在逆矩阵公式中:\(A^{-1} = \frac{1}{\det A}\,\operatorname{adj}(A)\)。
- 线性相关
- 当某一行(或列)可以表示为其他行(或列)的线性组合时。线性相关强制 \(\det A = 0\),意味着矩阵将 3D 空间映射到更低维的集合。
常见问题
行列式为零意味着什么?说明该矩阵是奇异矩阵,没有逆矩阵;其行向量或列向量线性相关。
行列式可以是负数吗?可以。负的行列式只是表示对应的线性变换会翻转方向;其绝对值依然代表体积的缩放倍数。
为什么要显示\(1/\det A\)?在矩阵逆的闭式公式中(伴随矩阵除以\(\det A\)),倒数是其中的一个标量因子,因此把它列出来作为参考会很方便。