
What Is Angular Momentum?
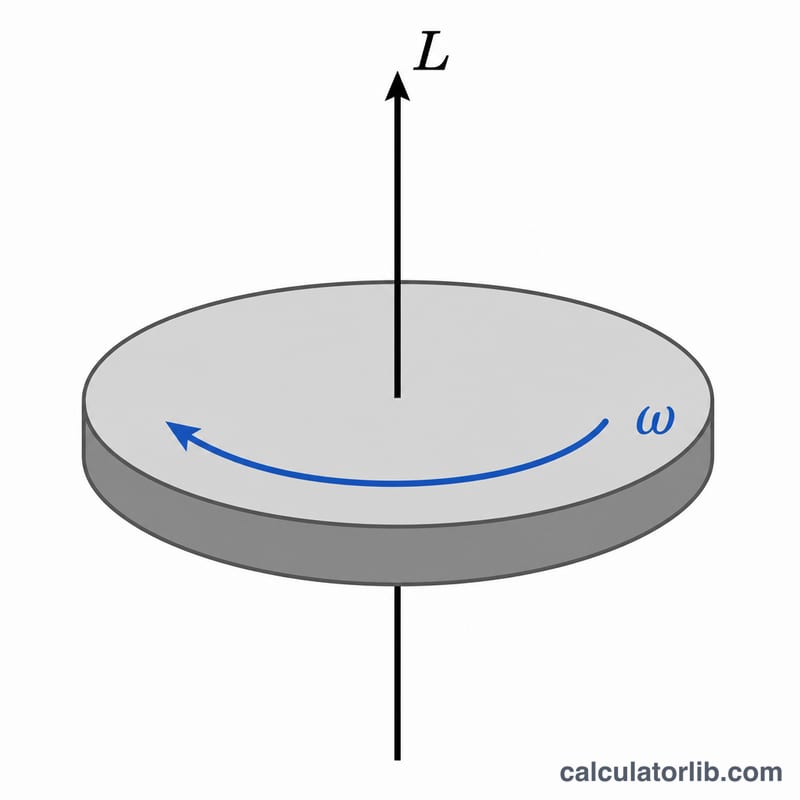
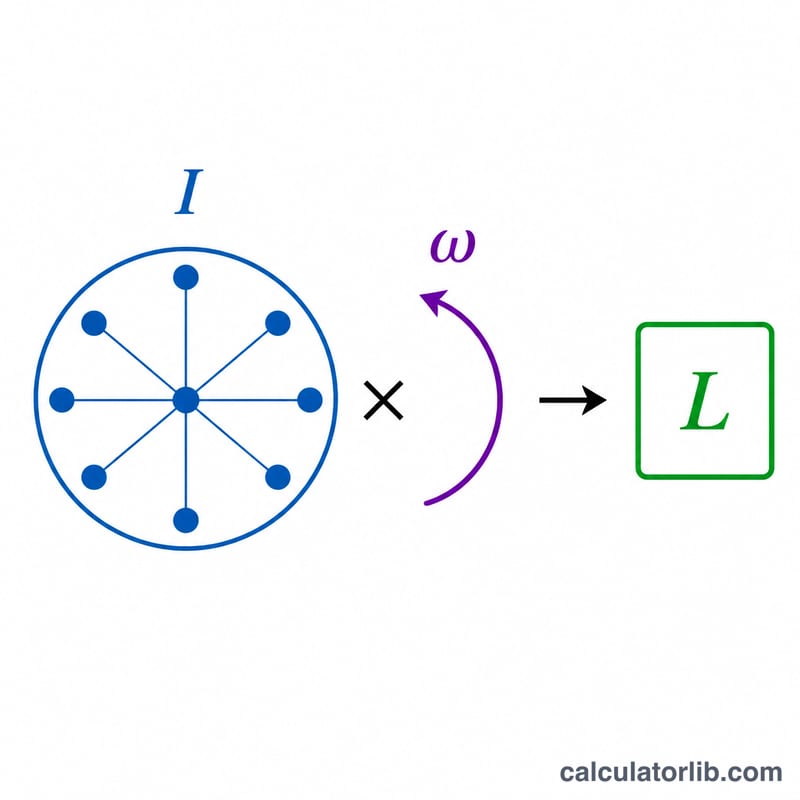
Angular momentum (L) is the rotational equivalent of linear momentum. It measures how much rotational motion an object has and how hard it is to stop that rotation. For a rigid body rotating about a fixed axis, angular momentum is the product of its moment of inertia (I) and its angular velocity (ω): $$L = I \times \omega$$. The SI unit is kilogram-metre squared per second (kg·m²/s).
How to Use This Calculator
Enter the object's moment of inertia in kg·m² and its angular velocity in radians per second (rad/s). The calculator multiplies the two to give the angular momentum. If your angular velocity is in revolutions per minute (RPM), convert first: \(\omega \text{ (rad/s)} = \text{RPM} \times 2\pi / 60\).
The Formula Explained
In $$L = I \times \omega$$, the moment of inertia I describes how mass is distributed relative to the rotation axis — a larger I means mass is farther from the axis and rotation is harder to change. The angular velocity ω is the rate of rotation in radians per second. Because angular momentum is conserved when no external torque acts, a spinning skater speeds up when pulling their arms in (reducing I increases ω so that L stays constant).
Worked Example
A solid disk has a moment of inertia of 2 kg·m² and spins at an angular velocity of 5 rad/s. Then $$L = 2 \times 5 = 10 \text{ kg}\cdot\text{m}^2/\text{s}$$ If the angular velocity doubled to 10 rad/s, the angular momentum would also double to 20 kg·m²/s.
Moment of Inertia for Common Shapes
The moment of inertia \(I\) depends on the mass distribution relative to the rotation axis. The table below gives standard formulas for idealized rigid bodies, where \(M\) is total mass, \(R\) is radius, and \(L\) is length. Each formula assumes the axis indicated.
| Body | Axis | Moment of Inertia \(I\) |
|---|---|---|
| Solid sphere | Through center (diameter) | \(\tfrac{2}{5}MR^2\) |
| Hollow (thin-shell) sphere | Through center (diameter) | \(\tfrac{2}{3}MR^2\) |
| Solid cylinder / disk | Central axis (along length) | \(\tfrac{1}{2}MR^2\) |
| Thin hoop / ring | Central axis (perpendicular to plane) | \(MR^2\) |
| Thin rod | Through center, perpendicular to rod | \(\tfrac{1}{12}ML^2\) |
| Thin rod | Through one end, perpendicular to rod | \(\tfrac{1}{3}ML^2\) |
For example, a solid disk with \(M = 2\ \text{kg}\) and \(R = 0.3\ \text{m}\) has \(I = \tfrac{1}{2}(2)(0.3)^2 = \) 0.09 kg·m². You can confirm shape-specific values with a moment of inertia calculator before computing angular momentum.
Key Terms & Variables
- Angular momentum, \(L\)
- The rotational analogue of linear momentum, defined as \(L = I\omega\). SI unit: kilogram-metre-squared per second (kg·m²/s), equivalently N·m·s. It is a vector directed along the rotation axis.
- Moment of inertia, \(I\)
- A measure of how mass is distributed about the rotation axis, quantifying resistance to angular acceleration. SI unit: kilogram-metre-squared (kg·m²). Larger \(I\) means more torque is needed to change rotation.
- Angular velocity, \(\omega\)
- The rate of change of angular position. SI unit: radians per second (rad/s). Related to rotational speed by \(\omega = 2\pi f\) and \(\omega = \text{RPM}\times 2\pi/60\).
- Torque, \(\tau\)
- The rotational equivalent of force. It equals the time rate of change of angular momentum, \(\tau = \dfrac{dL}{dt}\), and for constant \(I\) reduces to \(\tau = I\alpha\). SI unit: newton-metre (N·m).
- Conservation of angular momentum
- When the net external torque on a system is zero, total angular momentum stays constant: \(I_1\omega_1 = I_2\omega_2\). This is why a spinning skater speeds up when pulling their arms in — \(I\) decreases, so \(\omega\) increases.
FAQ
What units should I use? Use kg·m² for moment of inertia and rad/s for angular velocity to get angular momentum in kg·m²/s.
How do I convert RPM to rad/s? Multiply the RPM value by 2π and divide by 60. For example, \(60 \text{ RPM} = 60 \times 6.2832 / 60 = 6.283 \text{ rad/s}\).
Is angular momentum a vector? Yes, it has direction along the rotation axis (given by the right-hand rule), but for a single fixed axis we usually work with its magnitude as shown here.