什麼是 3×3 反矩陣計算器?
這個工具可計算任意 3×3 實數矩陣的反矩陣 \(A^{-1}\)。所謂反矩陣(逆矩陣),是唯一滿足 \(A\cdot A^{-1} = A^{-1}\cdot A = I\) 的矩陣,其中 \(I\) 為 3×3 單位矩陣。只有當矩陣 \(A\) 的行列式不等於 0 時,反矩陣才存在;否則該矩陣便稱為奇異矩陣(singular matrix),不具反矩陣。
使用方法
請依序(逐列)輸入矩陣的九個元素。標籤 a11~a33 代表第 \(i\) 列、第 \(j\) 行的位置。請直接輸入十進位數值(不支援像 1/3 這類分數寫法)。你也可以自訂顯示結果的有效位數。按下計算後,即可看到反矩陣與行列式的數值。
計算公式
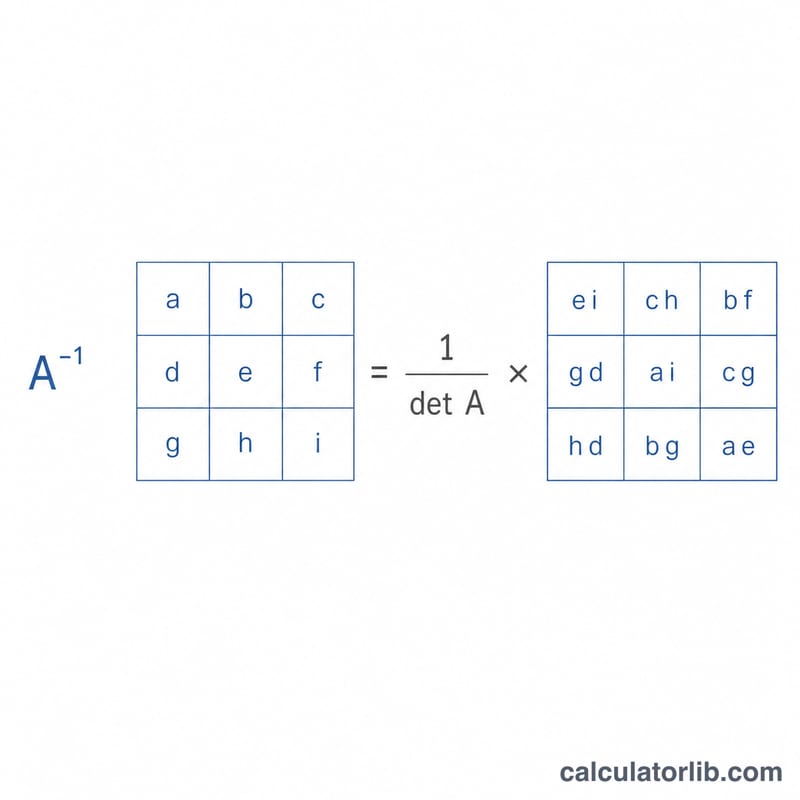
對於 \(A = [[a_{11},a_{12},a_{13}],[a_{21},a_{22},a_{23}],[a_{31},a_{32},a_{33}]]\),行列式為 $$\det A = a_{11}(a_{22}a_{33}-a_{23}a_{32}) - a_{12}(a_{21}a_{33}-a_{23}a_{31}) + a_{13}(a_{21}a_{32}-a_{22}a_{31})$$ 反矩陣則等於餘因子矩陣的轉置(即伴隨矩陣 adjugate)除以行列式: $$b_{ij} = \frac{C_{ji}}{\det A}$$
實例演算
以 \(A = [[1,2,3],[0,1,4],[5,6,0]]\) 為例。 $$\det A = 1(0-24) - 2(0-20) + 3(0-5) = -24 + 40 - 15 = 1$$ 其反矩陣為 $$A^{-1} = [[-24,18,5],[20,-15,-4],[-5,4,1]]$$ 你可以自行驗證 \(A\cdot A^{-1} = I\)。
關鍵術語與定義
- 行列式
- 從方陣項目計算出的單一純量 \(\det A\)。對於 3×3 矩陣,可以通過餘因子展開求得。它告訴您矩陣是否可逆:\(A^{-1}\) 存在當且僅當 \(\det A \neq 0\)。
- 子式
- 子式 \(M_{ij}\) 是刪除第 \(i\) 行和第 \(j\) 列後剩餘較小矩陣的行列式。對於 3×3 矩陣,每個子式都是 2×2 行列式。
- 餘因子
- 帶符號的子式:\(C_{ij}=(-1)^{i+j}M_{ij}\)。餘因子是行列式和伴隨矩陣的建構基塊。
- 伴隨矩陣(伴隨)
- 餘因子矩陣的轉置,記作 \(\operatorname{adj}(A)\)。逆矩陣公式為 \(A^{-1}=\tfrac{1}{\det A}\operatorname{adj}(A)\)。(在線性代數中,這種「伴隨」不同於複矩陣中使用的共軛轉置伴隨。)
- 單位矩陣
- 主對角線上全為 1、其他位置全為 0 的方陣 \(I\)。它充當乘法單位元:\(AI=IA=A\),根據定義 \(A\,A^{-1}=A^{-1}A=I\)。
- 奇異矩陣
- 行列式為零的方陣。奇異矩陣沒有逆矩陣,因為除以 \(\det A=0\) 是未定義的。
- 轉置
- 通過互換行和列得到的矩陣 \(A^{\mathsf T}\),所以項目 \((i,j)\) 變為項目 \((j,i)\)。對餘因子矩陣進行轉置可得伴隨矩陣。
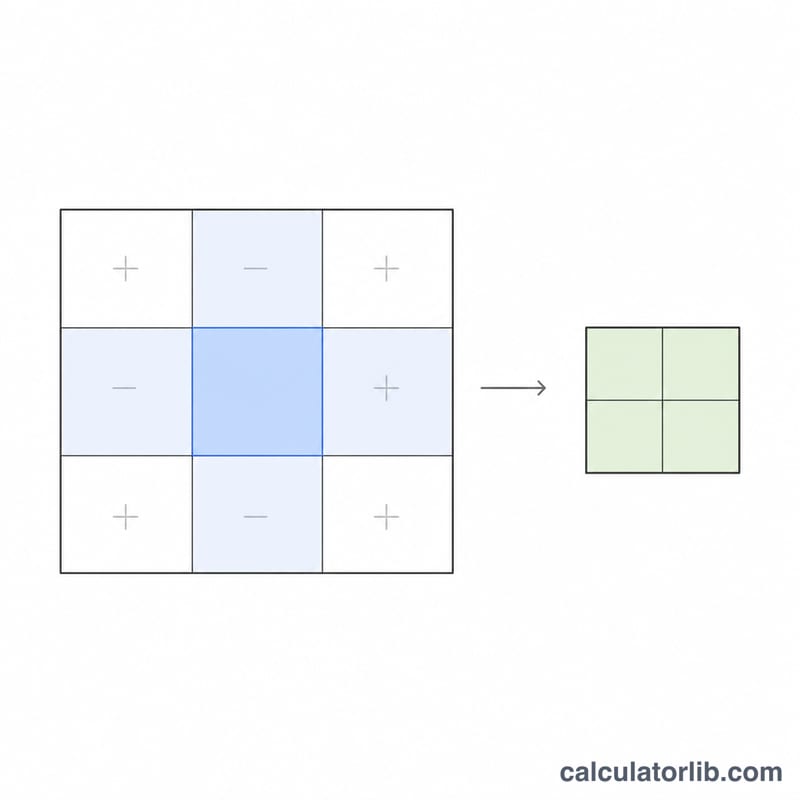
- 符號 / 棋盤式排列
- 應用於子式的 \((-1)^{i+j}\) 符號排列,交替呈棋盤式:\(\begin{pmatrix} + & - & + \\ - & + & - \\ + & - & +\end{pmatrix}\)。它將每個子式轉換為正確的餘因子。
常見問題
如果行列式等於 0 怎麼辦? 此時矩陣為奇異矩陣,反矩陣不存在;計算器會直接顯示明確提示訊息。
為什麼算出來的數值非常龐大? 當行列式非常接近 0 時,矩陣屬於近似奇異(near-singular),其反矩陣在數值上極不穩定,因而產生非常大的元素值。
單位矩陣的反矩陣是它自己嗎? 是的,單位矩陣的反矩陣仍是單位矩陣本身。