这个计算器能做什么
本工具用于计算相机的视角(视场角),以及在给定拍摄距离下相机实际能拍到的"拍摄范围"。只需输入镜头焦距、传感器(胶片)尺寸和被摄主体的距离,即可得到水平、垂直和对角线方向的视角,以及拍摄画面的宽度、高度、对角线长度和面积。其原理纯粹基于光学几何,适用于世界各地的任何相机——不涉及任何特定国家或地区的限制。
使用方法
以毫米为单位输入镜头焦距,选择一个传感器规格预设(或自定义输入传感器的宽度和高度,单位毫米),再输入被摄主体的距离并选择单位(米、厘米、毫米或千米)。内置的预设包括:35mm 全画幅(36 × 24)、APS-C(23.6 × 15.6)、M4/3 微单(17.3 × 13)和 1 英寸(13.2 × 8.8)。计算结果会显示视角覆盖范围,以及在该距离下画面所覆盖的真实矩形区域。
公式解析
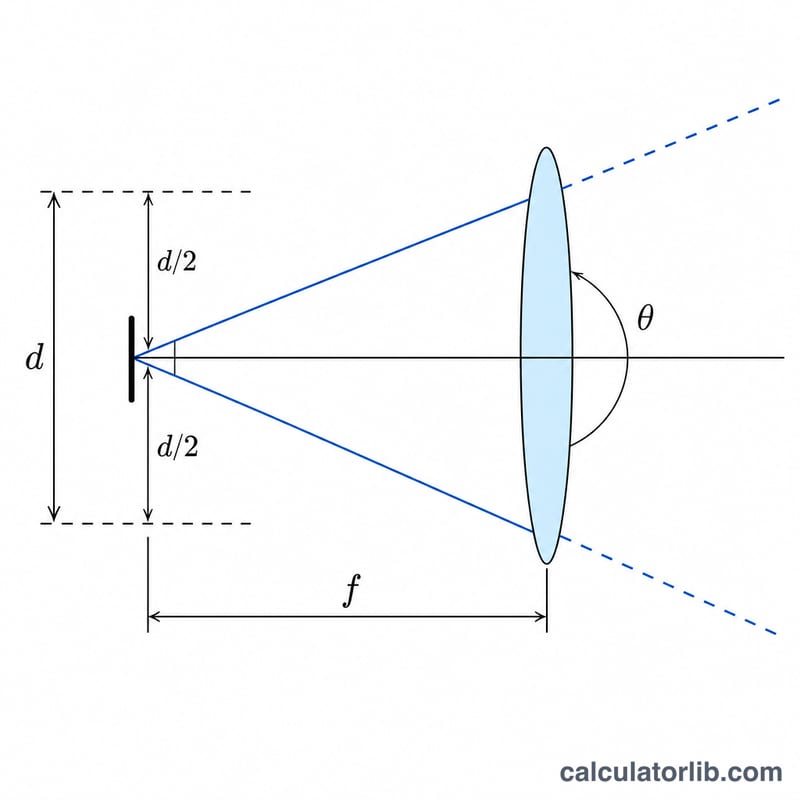
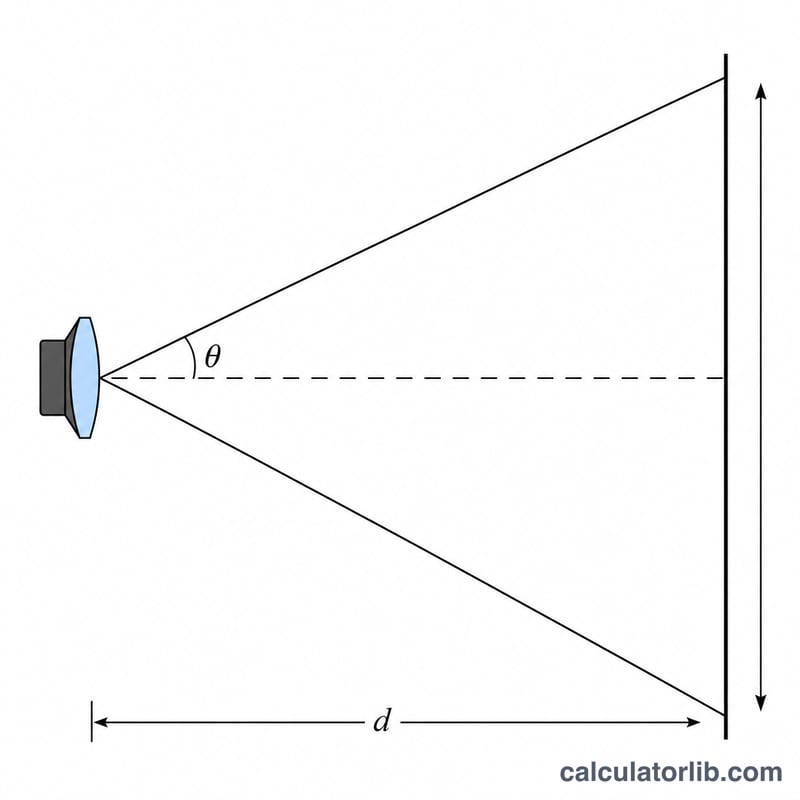
在薄透镜/针孔模型下,对于一条物理边长为 d、焦距为 f 的边,其视角为 $$\theta = 2\cdot\arctan\!\left(\frac{d}{2f}\right).$$ 在拍摄距离 L 处,根据相似三角形原理,拍摄范围尺寸 $$= \frac{L\cdot d}{f}.$$ 传感器对角线长度为 \(\text{diag} = \sqrt{\text{宽}^2 + \text{高}^2}\)。所有长度都会统一换算成一致的单位(本计算器以米为基准运算)。这种标准的摄影近似算法忽略了镜头畸变、瞳孔放大率和焦点呼吸效应。
实例演算
一支 50 mm 镜头搭配全画幅传感器(36 × 24 mm),拍摄距离 3 m 时:水平视角 $$= 2\cdot\arctan\!\left(\frac{36}{100}\right) = 39.6^\circ,$$ 垂直视角 \(= 27.0^\circ\),对角线视角 \(= 46.8^\circ\)。拍摄范围的宽度为 $$\frac{3 \times 0.036}{0.050} = 2.16\ \text{m},$$ 高度为 $$\frac{3 \times 0.024}{0.050} = 1.44\ \text{m}$$——面积约 \(3.11\ \text{m}^2\)。
常见问题
焦距越长,视角是更广还是更窄?更窄。焦距越大,视角越小,因此在相同距离下,长焦镜头拍到的范围更小。
为什么会有三个视角?矩形传感器有水平边、垂直边和对角线三个方向,每个方向都有各自的视角。对角线视角最大,通常人们所说的"视角"指的就是它。
计算出的拍摄范围精确吗?这是标准的薄透镜估算值。真实镜头存在畸变和焦点呼吸效应,因此应将这些数字视为接近实际的实用近似值。