
What is the Thrust-to-Weight Ratio?
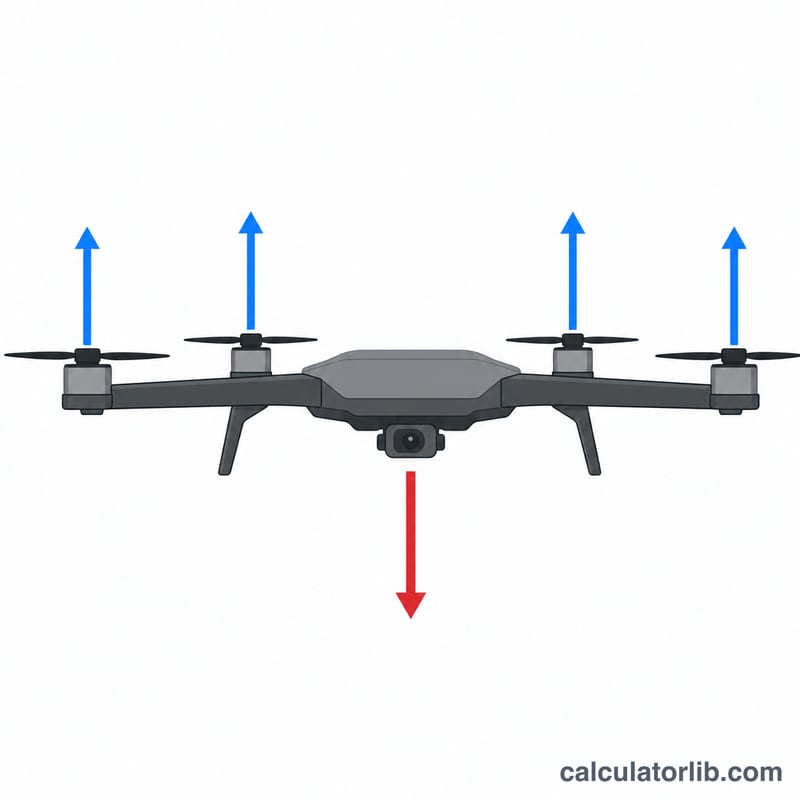
The thrust-to-weight ratio (TWR) tells you how much lifting power your drone or RC aircraft produces compared to how much it weighs. It is one of the most important numbers in a multirotor build: it determines whether your craft can even hover, how snappy it feels, and how much headroom you have for aggressive flying or carrying payloads. A TWR of 1:1 means your motors can just barely hold the aircraft in the air; anything below that and it will never leave the ground.
How to Use This Calculator
Enter the static thrust each motor produces at full throttle (from the motor manufacturer's data sheet, in grams), the number of motors on your craft, and the all-up weight (AUW) — the total ready-to-fly weight including frame, battery, camera, and props, in grams. The calculator multiplies thrust by motor count to get total thrust, then divides by the all-up weight to give your ratio.
The Formula Explained
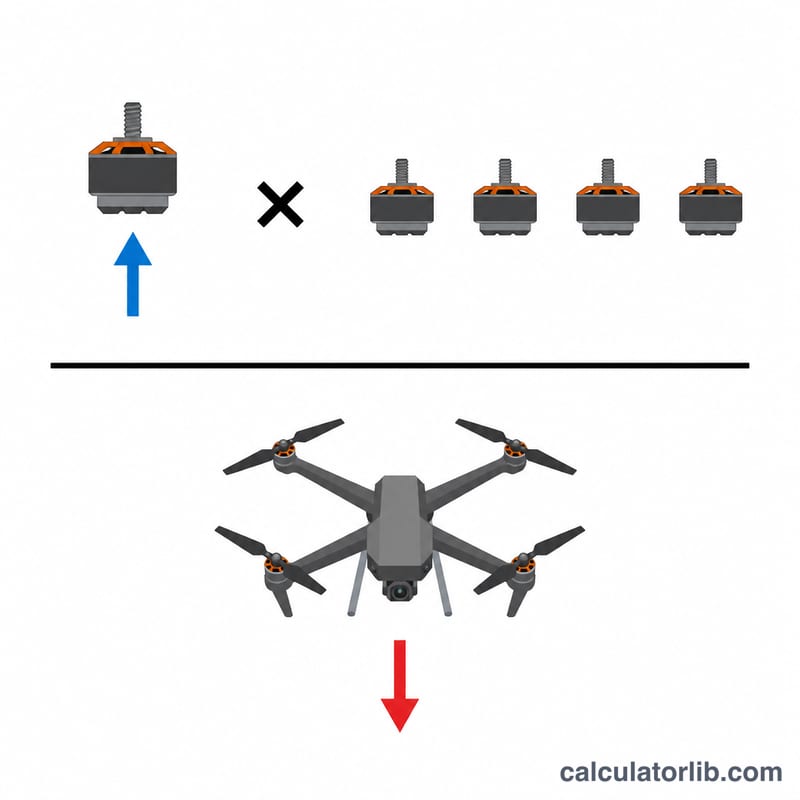
$$\text{TWR} = \frac{\text{Thrust/Motor (g)} \times \text{Motor Count}}{\text{AUW (g)}}$$ Both thrust and weight must use the same units (grams here), so the ratio is dimensionless. A quadcopter with four 600 g motors produces 2,400 g of total thrust; if it weighs 650 g, the TWR is \(2{,}400 \div 650 \approx 3.7:1\).
Worked Example
Suppose you build a 5-inch FPV freestyle quad. Each of the 4 motors makes 1,200 g of thrust, and the all-up weight is 650 g. Total thrust is \(1{,}200 \times 4 = 4{,}800\) g. $$\text{TWR} = 4{,}800 \div 650 \approx 7.4:1$$ — extremely powerful and great for freestyle.
FAQ
What TWR do I need? Aim for at least 2:1 for stable controllable flight, 3–4:1 for sporty freestyle, and 6:1+ for high-performance racing or freestyle. Cinematic/heavy-lift rigs often run 2–3:1.
Where do I find motor thrust? Manufacturers publish thrust tables for each motor + prop + voltage combination. Use the max thrust figure for the prop and battery cells you'll actually fly.
Does TWR change with battery? Yes — a heavier battery raises weight (lowering TWR) but may raise voltage and thrust. Always recalculate after changing components.