この計算ツールでできること
角度θの三角比が1つだけわかっていれば——たとえば \(\sin\theta = 3/5\)——、そしてその角度がどの象限にあるかがわかっていれば、ほかのすべての三角関数は一意に決まります。このツールは、その1つの三角比と象限を入力するだけで、正弦(sin)・余弦(cos)・正接(tan)・余割(csc)・正割(sec)・余接(cot)の6つの三角関数を、おおよその角度とあわせて一度に求めます。
使い方
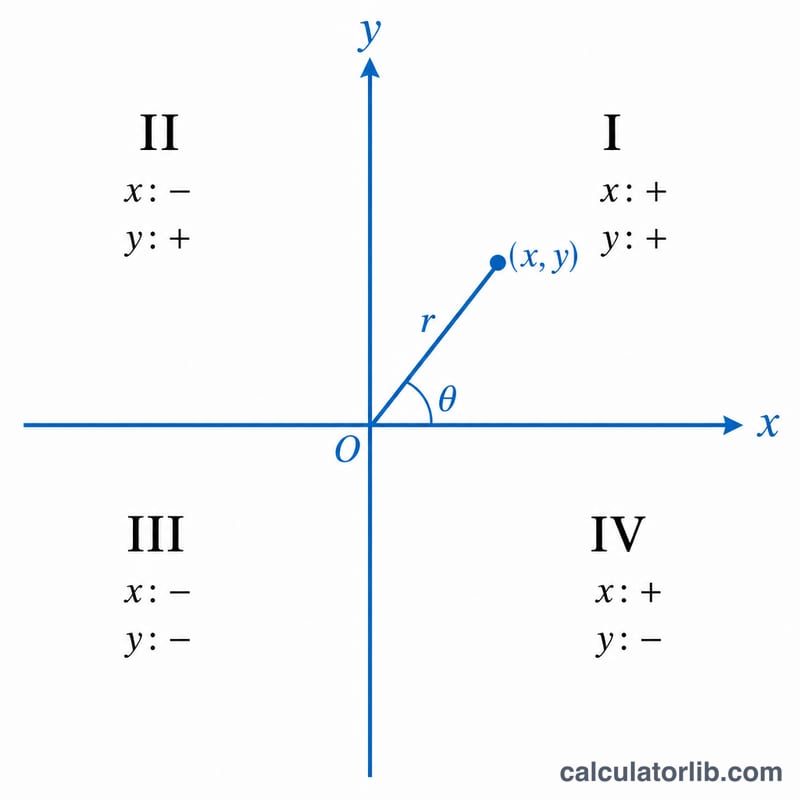
まずプルダウンから、わかっている三角関数を選びます。次にその値を入力し、θの象限(第Ⅰ・第Ⅱ・第Ⅲ・第Ⅳ象限)を指定してください。象限の指定は欠かせません。なぜなら、三角比の値だけでは符号が決まらないからです。たとえば \(\sin\theta\) は第Ⅰ・第Ⅱ象限で正、\(\cos\theta\) は第Ⅰ・第Ⅳ象限で正になります。この計算ツールは、こうした符号のルールを自動的に適用します。
計算式のしくみ
このツールはまず、入力された値を sin と cos に変換します。逆数の関数は逆数をとって戻します(たとえば \(\csc\theta\) が与えられたら \(\sin\theta = 1/\csc\theta\))。残るもう一方の基本比は、ピタゴラスの恒等式 \(\sin^2\theta + \cos^2\theta = 1\) から求めます。つまり
$$\cos\theta = \pm\sqrt{1 - \sin^2\theta}$$となり、符号は象限から決まります。正接・余接については \(1 + \tan^2\theta = \sec^2\theta\) を用います。最後に、逆数関係と商の関係から残りの関数を導きます。
計算例
\(\sin\theta = 0.6\) で、θ が第Ⅱ象限にあるとします。このとき
$$\cos\theta = -\sqrt{1 - 0.36} = -0.8$$(第Ⅱ象限では負)です。したがって \(\tan\theta = 0.6 / {-0.8} = -0.75\)、\(\csc\theta = 1/0.6 \approx 1.6667\)、\(\sec\theta = 1/{-0.8} = -1.25\)、\(\cot\theta = -0.8/0.6 \approx -1.3333\) となります。角度はおよそ \(143.13°\) です。
よくある質問
なぜ象限が必要なのですか? 異なる2つの角度が同じ sin(または cos)の値をとることがあるためです。象限を指定することで、残りの関数の符号が確定します。
値が定義されない場合はどうなりますか? 90° の \(\tan\theta\) や 0° の \(\csc\theta\) などは定義されません。そうしたセルには有限でない結果(非有限値)が表示されることがあります。
1より大きい値を入力できますか? tan・cot・sec・csc は範囲に制限がないので入力できます。ただし sin と cos は \(-1\) から \(1\) の間でなければなりません。