यह कैलकुलेटर क्या करता है
यह टूल दो द्वि-आयामी (2D) सदिशों को, जो उनके x और y घटकों के रूप में दिए गए होते हैं, जोड़ता या घटाता है और परिणामी सदिश लौटाता है। यह परिणामी घटक (Rx, Ry), परिमाण R, और दिशा θ बताता है — जहाँ θ धनात्मक x-अक्ष से वामावर्त (counterclockwise) दिशा में डिग्री में मापी जाती है। यह एक सार्वभौमिक गणित/भौतिकी टूल है और हर जगह काम करता है — इनपुट के सुसंगत होने के अलावा कोई देश-विशेष नियम या इकाई-प्रणाली की कोई शर्त नहीं है।
इसका उपयोग कैसे करें
सदिश A और सदिश B के x तथा y घटक दर्ज करें, जोड़ना है या घटाना यह चुनें, और परिणामी परिमाण व कोण पढ़ लें। यदि आपके सदिश परिमाण–कोण (magnitude–angle) रूप में दिए गए हैं, तो पहले उन्हें \(x = m\cdot\cos(\theta)\) और \(y = m\cdot\sin(\theta)\) से घटकों में बदलें, फिर वे मान यहाँ दर्ज करें।
सूत्र की व्याख्या
सदिशों का योग घटक-दर-घटक होता है:
$$R_x = A_x \pm B_x, \quad R_y = A_y \pm B_y$$(घटाने के लिए ऋण चिह्न का प्रयोग करें)। परिमाण पाइथागोरस प्रमेय से मिलता है, और दिशा के लिए दो-तर्क वाला आर्कटैन्जेंट प्रयोग होता है, जो साधारण arctan के विपरीत कोण को सही चतुर्थांश (quadrant) में रखता है और −180° से +180° के बीच मान देता है।
$$R = \sqrt{R_x^2 + R_y^2}, \quad \theta = \operatorname{atan2}(R_y, R_x)$$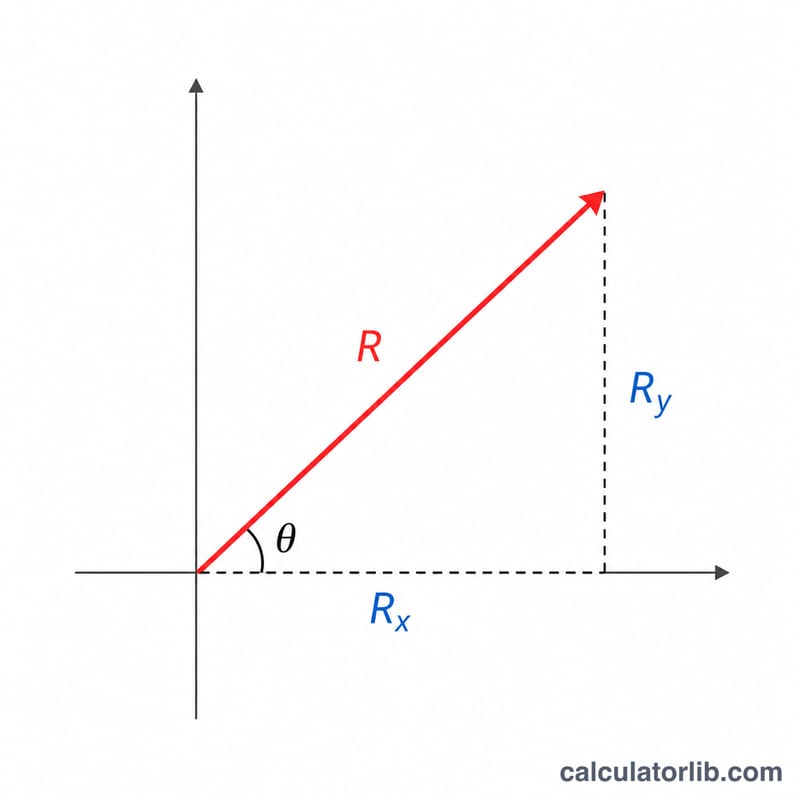
हल किया गया उदाहरण
A = (3, 4) और B = (1, 2) को जोड़ें। तब \(R_x = 3 + 1 = 4\) और \(R_y = 4 + 2 = 6\)। परिमाण
$$\sqrt{4^2 + 6^2} = \sqrt{52} \approx 7.2111$$इकाई होगा। दिशा \(\operatorname{atan2}(6, 4) \approx\) धनात्मक x-अक्ष से 56.31° ऊपर है।
परिभाषाएँ और शब्दावली
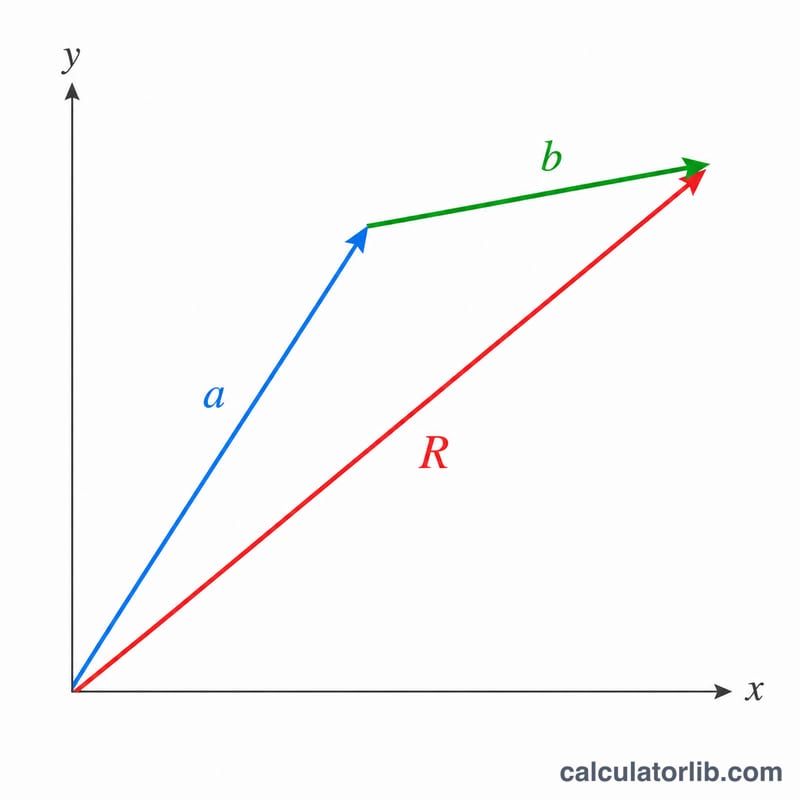
- परिणामी सदिश
- एक एकल सदिश \(\vec{R}\) जो दो सदिशों के योग (या अंतर) के बराबर है। जोड़ के लिए \(\vec{R} = \vec{A} + \vec{B}\); घटाव के लिए \(\vec{R} = \vec{A} - \vec{B}\)। यह संयुक्त सदिशों का शुद्ध प्रभाव दर्शाता है।
- घटक (x / y)
- एक सदिश का x- और y-अक्षों पर प्रक्षेप। \(R_x\) क्षैतिज भाग है और \(R_y\) ऊर्ध्वाधर भाग है। घटक स्वतंत्र रूप से जोड़े जाते हैं: \(R_x = A_x \pm B_x\), \(R_y = A_y \pm B_y\)। घटक मूल सदिशों के समान मनमाना लेकिन सुसंगत इकाई रखते हैं (m, N, m/s, आदि)।
- परिमाण
- सदिश की लंबाई, \(|\vec{R}| = \sqrt{R_x^2 + R_y^2}\)। हमेशा गैर-नकारात्मक और सदिशों की साझा इकाई में व्यक्त किया जाता है।
- दिशा कोण \(\theta\)
- वह कोण जो सदिश सकारात्मक x-अक्ष के साथ बनाता है, जिसे वामावर्त मापा जाता है। आमतौर पर डिग्री या रेडियन में रिपोर्ट किया जाता है; इकाई एक परिपाटी है, भौतिक मात्रा नहीं।
- atan2 बनाम atan
- \(\operatorname{atan}(R_y/R_x)\) केवल \((-90^\circ, 90^\circ)\) में मान लौटाता है और जब दोनों घटक नकारात्मक होते हैं या जब \(R_x<0\) होता है तो संकेत की जानकारी खो देता है। \(\operatorname{atan2}(R_y, R_x)\) दोनों घटकों के संकेतों का उपयोग करके पूर्ण रेंज \((-180^\circ, 180^\circ]\) में सही कोण लौटाता है, सदिश को उसके उचित चतुर्थांश में रखता है।
- सिरे-से-पूंछ जोड़
- एक आलेखीय विधि: \(\vec{A}\) खींचें, फिर \(\vec{B}\) को \(\vec{A}\) की नोक से शुरू करते हुए खींचें। परिणामी \(\vec{A}\) की पूंछ से \(\vec{B}\) की नोक तक चलता है। यह घटकों को जोड़ने के बराबर ज्यामितीय है।
अक्सर पूछे जाने वाले प्रश्न
ऋणात्मक कोण का क्या अर्थ है? ऋणात्मक \(\theta\) का मतलब है कि परिणामी सदिश धनात्मक x-अक्ष के नीचे (दक्षिणावर्त/clockwise दिशा में) इंगित कर रहा है। यदि आप 0–360° परास में कोण चाहते हैं तो उसमें 360° जोड़ दें।
क्या मैं सदिश घटा सकता हूँ? हाँ — A − B की गणना के लिए "घटाएं" विकल्प चुनें, जो A में B के विपरीत सदिश को जोड़ने के बराबर है।
यदि परिणामी शून्य हो तो? यदि दोनों घटक 0 हों तो परिमाण 0 होता है और दिशा अपरिभाषित रहती है; कैलकुलेटर परंपरानुसार 0° दर्शाएगा।